8 ژانویه 2024 -توسط دانشگاه ایالتی کارولینای شمالی
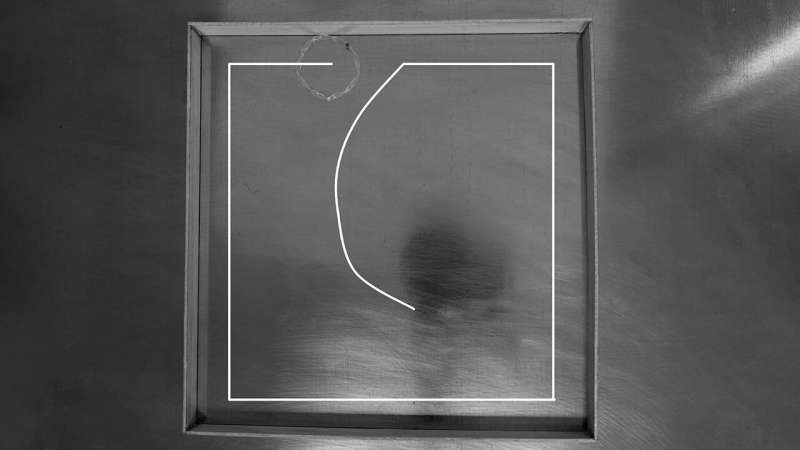
محققان طرح جدیدی از ربات نرم ایجاد کردهاند که سه رفتار همزمان را انجام میدهد: غلتیدن به جلو، چرخیدن مانند یک رکورد و دنبال کردن مسیری که حول یک نقطه مرکزی میچرخد. این دستگاه که بدون کنترل انسان یا رایانه کار میکند، نویدبخش توسعه دستگاههای روباتیک نرمی است که میتوانند برای مسیریابی و نقشهبرداری از محیطهای ناشناخته استفاده شوند. این تصویر مسیری را نشان می دهد که ربات برای ترسیم مرزهای یک فضای محدود طی کرده است. اعتبار: جی یین، دانشگاه ایالتی کارولینای شمالی
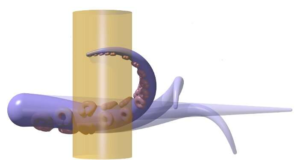
ربات های نرم جدید ربات های حلقه پیچ خورده نامیده می شوند. آنها از الاستومرهای کریستال مایع روبان مانند ساخته شده اند که پیچ خورده اند – مانند رشته فرنگی روتینی – و سپس در انتها به یکدیگر متصل می شوند تا حلقه ای شبیه یک دستبند را تشکیل دهند. وقتی ربات ها روی سطحی با دمای حداقل 55 درجه سانتیگراد (131 درجه فارنهایت) قرار می گیرند که گرمتر از هوای محیط است، قسمتی از روبان که سطح را لمس می کند منقبض می شود، در حالی که قسمتی از روبان که در معرض هوا قرار می گیرد یک حرکت چرخشی را القا می کند. هرچه سطح گرمتر باشد، ربات سریعتر می چرخد.
جی یین، نویسنده مسئول مقاله در مورد این کار و دانشیار مهندسی مکانیک و هوافضا در دانشگاه ایالتی کارولینای شمالی، میگوید: «روبان روی محور افقی خود میچرخد و به حلقه حرکت رو به جلو میدهد. مقاله با عنوان “توپولوژی حلقه پیچ خورده معیوب برای ربات نرم چرخشی دوره ای خودمختار” در Proceedings of the National Academy of Sciences منتشر شد.
ربات حلقه پیچ خورده نیز در امتداد محور مرکزی خود می چرخد، مانند یک رکورد روی یک صفحه گردان و همانطور که ربات حلقه پیچ خورده به جلو حرکت می کند، در یک مسیر مداری حول یک نقطه مرکزی حرکت می کند، اساساً در یک دایره بزرگ حرکت می کند. با این حال، اگر ربات حلقه پیچ خورده با یک مرز روبرو شود – مانند دیواره یک جعبه – در امتداد مرز حرکت می کند.
یین می گوید: «این رفتار می تواند به ویژه برای نقشه برداری محیط های ناشناخته مفید باشد.
رباتهای حلقهای پیچ خورده نمونههایی از دستگاههایی هستند که رفتارشان توسط هوش فیزیکی کنترل میشود، به این معنی که اقدامات آنها توسط طراحی ساختاری و موادی که از آن ساخته شدهاند تعیین میشود، نه اینکه توسط کامپیوتر یا دخالت انسان هدایت شوند.
محققان می توانند با مهندسی هندسه دستگاه، رفتار ربات حلقه پیچ خورده را تنظیم کنند. به عنوان مثال، آنها می توانند جهت چرخش ربات حلقه پیچ خورده را با چرخاندن روبان به یک جهت کنترل کنند. سرعت را می توان با تغییر عرض روبان، تعداد پیچش های روبان و غیره تحت تأثیر قرار داد.
در آزمایش اثبات مفهومی، محققان نشان دادند که ربات حلقه پیچ خورده قادر است خطوط مختلف فضاهای محدود را دنبال کند.
Fangjie Qi نویسنده اول مقاله ودانشجوی دکتری در ایالت NC می گوید: صرف نظر از اینکه ربات حلقه پیچ خورده در کجا به این فضاها معرفی می شود، می تواند راه خود را به یک مرز باز کند و خطوط مرزی را دنبال کند تا خطوط فضا را ترسیم کند – خواه مربع باشد، مثلث و غیره. همچنین شکاف ها یا آسیب های موجود در مرز را شناسایی می کند.
Qi میگوید: «ما همچنین توانستیم مرزهای فضاهای پیچیدهتر را با معرفی دو ربات حلقهای پیچ خورده در فضا ترسیم کنیم که هر ربات در جهت متفاوتی میچرخد. “این باعث می شود که آنها مسیرهای مختلفی را در امتداد مرز انتخاب کنند. و با مقایسه مسیرهای هر دو ربات حلقه پیچ خورده، می توانیم خطوط فضای پیچیده تر را به تصویر بکشیم.”
یین میگوید: «در اصل، مهم نیست که یک فضا چقدر پیچیده باشد، اگر رباتهای حلقه پیچ خورده را به اندازه کافی برای نقشهبرداری کل تصویر معرفی کنید، میتوانید آن را ترسیم کنید و با توجه به اینکه تولید آنها نسبتاً ارزان است، این امر قابل دوام است.
یین می گوید: «روباتیک نرم هنوز یک رشته نسبتاً جدید است. “پیدا کردن راههای جدید برای کنترل حرکت روباتهای نرم به روشی مهندسیشده و قابل تکرار، زمینه را به جلو میبرد. و ارتقای درک ما از آنچه ممکن است، هیجانانگیز است.”