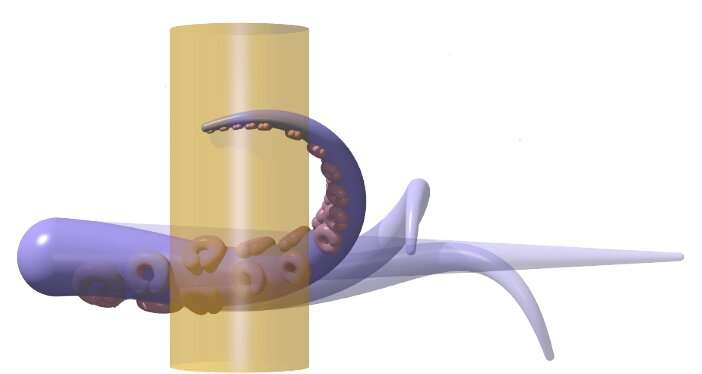
24 فوریه 2023 -توسط کالج مهندسی دانشگاه ایلینویز گرینگر-شبیه سازی اختاپوس در حال گرفتن یک استوانه. اعتبار: کالج مهندسی Grainger در دانشگاه ایلینویز Urbana-Champaign
بازوهای اختاپوس تقریباً بی نهایت درجات آزادی را برای انجام حرکات پیچیده مانند رسیدن، گرفتن، خزیدن و شنا هماهنگ می کنند. این که چگونه این حیوانات به چنین طیف وسیعی از فعالیت ها دست می یابند، منبعی از رمز و راز، شگفتی و الهام است. بخشی از چالش ناشی از سازماندهی پیچیده و بیومکانیک عضلات داخلی است.
این مشکل در یک پروژه چند رشته ای به رهبری پراشانت مهتا و ماتیا گاززولا، استادان علوم و مهندسی مکانیک در دانشگاه ایلینویز Urbana-Champaign حل شد.
همانطور که در Proceedings of the Royal Society A گزارش شده است، این دو محقق و گروه آنها یک مدل دقیق فیزیولوژیکی از عضلات بازوی اختاپوس ایجاد کرده اند. مهتا گفت: «مدل ما، اولین در نوع خود، نه تنها بینشی در مورد مشکل بیولوژیکی ارائه می دهد، بلکه چارچوبی برای طراحی و کنترل روبات های نرم در آینده ارائه می دهد.
قابلیتهای چشمگیر بازوهای اختاپوس مدتهاست که الهامبخش طراحی و کنترل روباتهای نرم بوده است. چنین روباتهای نرمی دارای پتانسیل انجام وظایف پیچیده در محیطهای بدون ساختار و در عین حال کارکرد ایمن در اطراف انسان، با کاربردهای مختلف از کشاورزی تا جراحی هستند.
دانشجوی فارغ التحصیل، هنگ-شنگ چانگ، نویسنده ارشد این مطالعه، توضیح داد که سیستم های نرم بدن مانند بازوهای اختاپوس یک چالش بزرگ مدل سازی و کنترل هستند. او گفت: “آنها توسط سه گروه عضلانی داخلی اصلی – طولی، عرضی و مورب – هدایت می شوند که باعث تغییر شکل بازو در چندین حالت – برش، امتداد، خم شدن و چرخش می شود.” این به بازوهای عضلانی نرم بر خلاف همتایان سفت و سخت خود، آزادی قابل توجهی می بخشد.
بینش کلیدی تیم این بود که عضله بازو را با استفاده از تابع انرژی ذخیره شده بیان کند، مفهومی که از نظریه مکانیک پیوسته وام گرفته شده است. اودیت هالدر، محقق پسادکتری و نویسنده مرتبط توضیح داد که “بازو در حداقل چشم انداز انرژی قرار می گیرد. تحرکات ماهیچه ای عملکرد انرژی ذخیره شده را تغییر می دهد، بنابراین موقعیت تعادل بازو را تغییر می دهد و حرکت را هدایت می کند.”
تفسیر عضلات با استفاده از انرژی ذخیره شده به طور چشمگیری طراحی کنترل بازو را ساده می کند. به طور خاص، این مطالعه یک روش کنترل شکلدهی انرژی را برای محاسبه فعالیتهای ماهیچهای لازم برای حل کارهای دستکاری مانند رسیدن و گرفتن ترسیم میکند. هنگامی که این رویکرد به صورت عددی در محیط نرم افزار الاستیکا نشان داده شد، این مدل منجر به حرکت قابل توجهی شبیه به زندگی زمانی که یک بازوی اختاپوس در سه بعدی شبیه سازی شد، شد. علاوه بر این، به گفته هالدر، “کار ما تضمین های ریاضی عملکردی را ارائه می دهد که اغلب در رویکردهای جایگزین، از جمله یادگیری ماشینی وجود ندارد.”
مهتا گفت: “کار ما بخشی از یک اکوسیستم بزرگتر از همکاری های مداوم در دانشگاه ایلینویز است. در بالادست، زیست شناسانی وجود دارند که آزمایش هایی را روی اختاپوس انجام می دهند. در پایین دست، روباتیک هایی وجود دارند که از این ایده های ریاضی استفاده می کنند و آنها را روی ربات های نرم واقعی به کار می برند.
گروه های مهتا و گاززولا با رانور ژیلت، پروفسور بازنشسته فیزیولوژی مولکولی و یکپارچه ایلینویز همکاری کردند تا فیزیولوژی اختاپوس مشاهده شده را در مدل ریاضی خود برای این مطالعه بگنجانند. کار آینده در مورد پیامدهای بیولوژیکی کنترل مبتنی بر انرژی بحث خواهد کرد. علاوه بر این، محققان با Girish Krishnan، استاد مهندسی سیستمهای صنعتی و سازمانی ایلینویز همکاری میکنند تا ایدههای ریاضی خود را در طراحی و کنترل ربات نرم واقعی بگنجانند. این نه تنها یک روش سیستماتیک برای کنترل رباتهای نرم ایجاد میکند، بلکه درک عمیقتری از مکانیسمهای کار آنها را نیز فراهم میکند.
این کار بخشی از پروژه CyberOctopus، یک ابتکار تحقیقاتی چند رشتهای دانشگاهی در آزمایشگاه علمی هماهنگ دانشگاه ایلینوی بود که توسط دفتر تحقیقات نیروی دریایی پشتیبانی میشود