19 جولای 2022 -توسط جف مولولم، دانشگاه ایالتی پنسیلوانیا -اعتبار: دامنه عمومی Pixabay/CC0
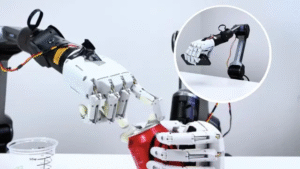
مهندسان کشاورزی ایالت پن برای اولین بار یک نمونه اولیه از “End-effector” ساخته اند که می تواند به طرز ماهرانه ای سیب های ناخواسته را از درختان پاک کند – اولین گام به سمت رباتیک کردن جدا نمودن میوه های سبز.
به گفته لانگ هی، استادیار مهندسی کشاورزی و بیولوژیکی، این توسعه مهم است، زیرا جدا کردن دستی یک کار پر زحمت است و کاهش نیروی کار در تولید سیب، جداکردن دستی را از نظر اقتصادی غیرممکن میکند. گروه تحقیقاتی او در کالج علوم کشاورزی مطالعه جدیدی انجام داد که منجر به اثر نهایی شد.
به گفته او که پیشرو در تحقیقات رباتیک کشاورزی است که قبلاً قطعات خودکار برای قارچ را توسعه داده بود، محصول سیب یک کالای کشاورزی با ارزش در ایالات متحده است که مجموع تولید سالانه آن نزدیک به 10 میلیارد پوند و ارزش آن نزدیک به 3 میلیارد دلار است. چیدن و هرس درخت سیب. با جدا کردن میوه سبز – فرآیند دور ریختن میوه های اضافی در اوایل تابستان، عمدتا برای افزایش اندازه و کیفیت میوه باقیمانده – یکی از مهمترین جنبه های تولید سیب است.
او گفت: “در نهایت – در دهه آینده، امیدواریم – این اثرگر نهایی با یک جزء بینایی ماشینی و یک سیستم حرکتی ترکیب شود و مکانیزمی را ایجاد کند که در نهایت قادر به انجام کار در باغهای سیب خواهد بود.” میدانم که این بهطور زیادی آیندهنگر به نظر میرسد، اما فکر میکنم این جایی است که زودتر باید برویم .
قبل از طراحی نهایی، محقق اصلی Magni Hussain، دانشجوی دکترا در گروه مهندسی کشاورزی و بیولوژیکی، یک سری آزمایشات دینامیک حذف میوه را برای تعیین نیروهای مورد نیاز برای نازک شدن رباتیک، با استفاده از کشیدن یا ساقه انجام داد. روش های برش در سه رقم مختلف سیب این کار در مرکز تحقیقات و توسعه میوه پنسیلوانیا در بیگلرویل، در جنوب مرکزی پنسیلوانیا انجام شد.
حسین پس از دریافت این که حذف میوه با استفاده از روش کشیدن منجر به افزایش جداشدگی ساقه انتهایی می شد – که میتواند زخمی را بر جای بگذارد که میوههای همسایه را در یک خوشه تحت تاثیر قرار دهد – حسین یک نمونه اولیه عامل انتهایی ساخت و آزمایشهای میدانی گستردهای انجام داد. او دو پیکربندی نمونه اولیه اثر پایانی را آزمایش کرد: یکی قرار دادن افکتور پایانی روی یک نوار دستی. دیگری ادغام اثر پایانی با یک دستکاری رباتیک.
محققان اخیراً در مجله انجمن مهندسین کشاورزی و بیولوژیکی آمریکا گزارش دادند که میزان موفقیت جدا نمودن میوه سبز برای همه آزمایشهای نمونه اولیه اثر نهایی بیش از 90 درصد بود. پیوند اثر پایانی با دستکاریکننده رباتیک، پتانسیل یک سیستم رباتیک میوه سبز را برای حذف میوه در مکانها و جهتهای مختلف نشان داد. محققان پیشنهاد کردند که رقیق کردن میوه سبز رباتیک به طور بالقوه می تواند به اندازه نازک شدن دستی انتخابی باشد.