27 اکتبر 2021توسط Asociacion RUVID
یک تیم تحقیقاتی از آزمایشگاه سیستمهای تعاملی و رباتیک در دانشگاه Jaume I در Castelló نرمافزاری را توسعه دادهاند که به رباتهای زیر آب با قابلیت دستکاری اجازه میدهد تا از راه دور به روشی کارآمدتر کنترل شوند، زیرا یک رابط گرافیکی کامپیوتری و شبیهسازی واقعی قبلی را ارائه میدهد. فناوری جدید، در زمینه سناریوهای زیر آب، فقدان سیستمهای شبیه سازی و رابطهای سه بعدی واقع گرایانه را که امکان کنترل از راه دور وظایف را در روباتهای دستکاری کننده سیار مستقل و از راه دور فراهم میکند، اصلاح میکند.
استفاده از رباتها در وضعیتهای خطرناک ضروری است، به ویژه در موقعیتهای ناشی از تصادفات، آتشسوزی، دود، تشعشع یا آب عمیق که دسترسی به آنها تقریبا غیرممکن است. نرم افزار جدید واقعیت دریافت شده از ربات واقع در محیط خطرناک را غنی میکند و آن را با اطلاعات سه بعدی استخراج شده با تکنیکهای هوش مصنوعی یکی میکند. این منجر به یک واقعیت ترکیبی میشود که برای کاربران بسیار مفید است.
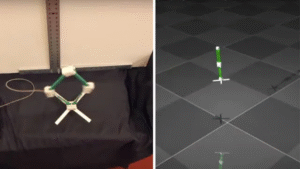
این سیستم با به دست آوردن دادههای واقعی در مورد موقعیت وسیله نقلیه و بازوی دستکاری و همچنین اطلاعات دریافتی از دوربینها و سنسورها، نمایش وضعیت رباتها در محیط سه بعدی را ممکن میسازد. رابط کاربری دارای یک سیستم شبیهسازی واقع گرایانه برای آزمایش توابع ربات و تله متری شبیه سازی شده قبل از تعامل با سیستمهای واقعی است. این امر باعث میشود تا کارایی بیشتری در کارهای انجام شده توسط ربات انجام شود و ایمنی افراد در چنین شرایطی تضمین شود.
نرم افزار جدید دستیابی به رباتهای زیر آب را امکانپذیر میکند که قادر به دستکاری، اطاعت از دستورات اپراتور انسانی و شبیه سازی اثرات اقدامات رباتیک قبل از وقوع باشند. در عین حال، اطلاعات ارائه شده به کاربر را غنی میکند، به نظارت بر کار کمک میکند و ایمنی مداخلات را بهبود میبخشد. یکی از مزایای آن این است که دقت بیشتری در دستکاری و کنترل رباتها در سناریوهای نامطلوب یا خطرناک ارائه میدهد.
بخشهای اصلی که میتوانند از این فناوری جدید بهرهمند شوند، بخشهایی هستند که به رباتیک مشارکتی (به عنوان مثال صنعت 4.0)، محیطهای زیر آب، رادیواکتیو یا خطرناک برای سلامت انسان به دلیل آتش و دود، و همچنین تحقیقات امنیتی و مخابراتی مرتبط هستند. تیم تحقیقاتی به دنبال توافقنامههای خاص و موافقت نامههای مجوز بعدی با شرکتها برای توسعه و انطباق فناوری با کاربردهای خاص است.
توسعه این رابط کاربری در طول اجرای پروژه TWINBOT انجام شده و در شرایط واقعی با دو وسیله نقلیه G500 در مرکز تحقیقات رباتیک و فناوریهای زیر آب دانشگاه Jaume I Castelló (CIRTESU) تأیید شده است. این نرم افزار همچنین در سال اول پروژه اروپایی H2020-El-Peacetolero بهبود یافته و با محیطهای صنعتی و بیمارستانی سازگار شده است.
https://techxplore.com