21 ژوئن 2022 – توسط جنیفر چو، موسسه فناوری ماساچوست
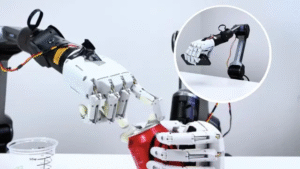
یک ابزار بهینه سازی همه منظوره جدید می تواند عملکرد بسیاری از سیستم های رباتیک مستقل را بهبود بخشد. در اینجا یک نمایش سخت افزاری نشان داده شده است که در آن ابزار به طور خودکار عملکرد دو ربات را که با هم کار می کنند برای جابجایی یک جعبه سنگین بهینه می کند.
رباتهای خودران راه درازی را پیمودهاند. در سالهای اخیر، سیستمهای هوشمند مصنوعی در خودروهای خودران، تحویل غذا ، خدمات رستوران، غربالگری بیماران، نظافت بیمارستان، آمادهسازی غذا، امنیت ساختمان و بستهبندی انبار به کار گرفته شدهاند.
هر یک از این سیستم های رباتیک محصول یک فرآیند طراحی موقتی مخصوص آن سیستم خاص است. در طراحی یک ربات مستقل، مهندسان باید شبیهسازیهای آزمایش و خطای بیشماری را اجرا کنند که اغلب از طریق شهود انجام میشود. این شبیهسازیها بر اساس اجزا و وظایف یک ربات خاص، به منظور تنظیم و بهینهسازی عملکرد آن، طراحی شدهاند. در حال حاضر، مهندسان MIT یک ابزار طراحی کلی برای رباتیکها ایجاد کردهاند تا از آن به عنوان نوعی دستور العمل خودکار برای موفقیت استفاده کنند. این تیم یک کد بهینه سازی ابداع کرده است که می تواند برای شبیه سازی تقریباً هر سیستم رباتیک مستقلی اعمال شود و می تواند برای شناسایی خودکار نحوه و مکان تنظیم یک سیستم برای بهبود عملکرد ربات استفاده شود.
این تیم نشان داد که این ابزار میتواند به سرعت عملکرد دو سیستم مستقل بسیار متفاوت را بهبود بخشد: یکی که در آن یک روبات مسیری را بین دو مانع حرکت میکند و دیگری که در آن یک جفت ربات با هم کار میکنند تا یک جعبه سنگین را جابجا کنند.
محققان امیدوارند که بهینه ساز همه منظوره جدید بتواند به سرعت بخشیدن به توسعه طیف گسترده ای از سیستم های خودمختار، از روبات های پیاده روی و وسایل نقلیه خودران، تا روبات های نرم و ماهر، و تیم هایی از ربات های مشارکتی کمک کند.
این تیم متشکل از چارلز داوسون، دانشجوی کارشناسی ارشد MIT، و چوچو فن، استادیار دپارتمان هوانوردی و فضانوردی MIT، یافتههای خود را اواخر این ماه در کنفرانس سالانه Robotics: Science and Systems در نیویورک ارائه خواهند کرد.
داوسون و فن پس از مشاهده انبوهی از ابزارهای طراحی خودکار موجود برای سایر رشته های مهندسی، به نیاز به یک ابزار بهینه سازی عمومی پی بردند.
داوسون میگوید: «اگر یک مهندس مکانیک میخواهد یک توربین بادی طراحی کند، میتواند از یک ابزار CAD سه بعدی برای طراحی سازه استفاده کند، سپس از ابزار تحلیل المان محدود برای بررسی اینکه آیا در برابر بارهای خاص مقاومت میکند یا خیر، استفاده کند. با این حال، کمبود این ابزارهای طراحی به کمک رایانه برای سیستمهای مستقل وجود دارد.»
به طور معمول، رباتیک یک سیستم مستقل را با توسعه یک شبیه سازی از سیستم و بسیاری از زیرسیستم های متقابل آن، مانند برنامه ریزی، کنترل، ادراک و اجزای سخت افزاری، بهینه می کند. سپس او باید پارامترهای خاصی از هر جزء را تنظیم کند و شبیه سازی را به جلو اجرا کند تا ببیند سیستم در آن سناریو چگونه عمل می کند.
تنها پس از اجرای بسیاری از سناریوها از طریق آزمون و خطا، یک متخصص ربات می تواند ترکیب بهینه عوامل تشکیل دهنده را برای به دست آوردن عملکرد مطلوب شناسایی کند. این یک فرآیند خسته کننده، بیش از حد سفارشی و وقت گیر است که داوسون و فن به دنبال آن بودند تا سر از آن در بیاورند.
به جای اینکه بگویید “با توجه به یک طرح، عملکرد چیست؟” داوسون توضیح میدهد که «با توجه به عملکردی که میخواهیم ببینیم، چه طرحی ما را به آنجا میرساند؟» این را وارونه کنیم.
محققان یک چارچوب بهینهسازی یا یک کد کامپیوتری ایجاد کردند که میتواند به طور خودکار تغییراتی را پیدا کند که میتوان در یک سیستم مستقل موجود برای دستیابی به یک نتیجه دلخواه ایجاد کرد.
قلب کد مبتنی بر تمایز خودکار یا “autodiff” است، یک ابزار برنامه نویسی که در جامعه یادگیری ماشین توسعه داده شد و در ابتدا برای آموزش شبکه های عصبی مورد استفاده قرار گرفت. Autodiff تکنیکی است که می تواند به سرعت و کارآمدی مشتق را ارزیابی کند، یا حساسیت به تغییر هر پارامتر در یک برنامه کامپیوتری را ارزیابی کند. داوسون و فن بر اساس پیشرفتهای اخیر در برنامهنویسی autodiff برای توسعه یک ابزار بهینهسازی همه منظوره برای سیستمهای رباتیک مستقل ساخته شدهاند.
داوسون میگوید: «روش ما بهطور خودکار به ما میگوید که چگونه از یک طرح اولیه به سمت طرحی که به اهدافمان میرسد، قدمهای کوچک برداریم». ما از autodiff استفاده میکنیم تا اساساً کدی را که شبیهساز را تعریف میکند بررسی کنیم و بفهمیم که چگونه این وارونگی را به طور خودکار انجام دهیم.
این تیم ابزار جدید خود را بر روی دو سیستم رباتیک مستقل جداگانه آزمایش کردند و نشان دادند که این ابزار به سرعت عملکرد هر سیستم را در آزمایشهای آزمایشگاهی در مقایسه با روشهای بهینهسازی مرسوم بهبود میبخشد.
اولین سیستم شامل یک ربات چرخدار بود که وظیفه داشت مسیری بین دو مانع را بر اساس سیگنال هایی که از دو مانع دریافت می کرد برنامه ریزی کند.