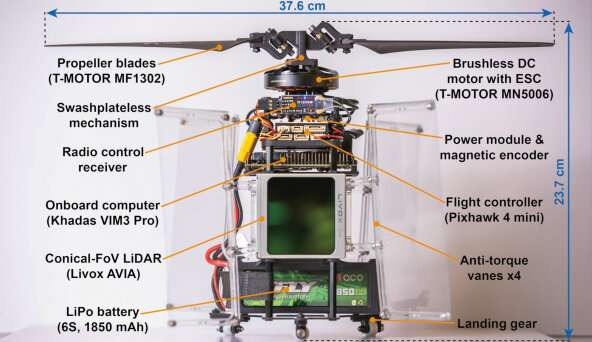
30 مه 2023 – توسط دانشگاه هنگ کنگ-ساختار PULSAR. اعتبار: دانشگاه هنگ کنگ
دنیایی را تصور کنید که در آن داستانهای علمی تخیلی با واقعیت روبرو میشوند، جایی که فناوریهای پیشرفته صحنههای الهامبخش فیلمهایی مانند پرومتئوس را زنده میکنند. این تحقیق پیشگامانه ای است که توسط دکتر فو ژانگ، استادیار گروه مهندسی مکانیک در دانشکده مهندسی، دانشگاه هنگ کنگ (HKU) رهبری می شود، که یک ربات هوایی با قابلیت پرواز فوق العاده ضعیف LiDAR- Sensing را توسعه داده است PULSAR . که آماده است تا دنیای وسایل نقلیه هوایی بدون خلبان (UAV) را دوباره تعریف کند.
پهپادها در حال حاضر نقش حیاتی فزاینده ای در جستجو و نجات، نقشه برداری غارها و نقشه برداری معماری ایفا می کنند. PULSAR که بهخاطر شباهتهایش به الگوی خود چرخشی و اسکن یک تپاختر نجومی نامگذاری شده است، فناوری پهپاد را به ارتفاعات جدیدی میبرد. با یک میکرو کامپیوتر و یک حسگر LiDAR، PULSAR دارای قابلیتهای کامل درک، نقشهبرداری، برنامهریزی و کنترل در محیطهای داخلی و خارجی است، همگی بدون نیاز به ابزار خارجی.
راز عملکرد باورنکردنی PULSAR در محرک واحد آن نهفته است که مکانیزم بدون صفحه را به کار میگیرد و نیروی رانش و در لحظه را فراهم میکند. از طریق یک سری آزمایش، تیم دکتر ژانگ توانایی PULSAR را در تشخیص موانع استاتیک و دینامیک در زمان واقعی، ردیابی مسیرهای پیچیده و حرکت به صورت مستقل حتی در تاریکی کامل نشان دادند.
استحکام PULSAR همچنین به مقاومت در برابر مزاحمت های باد
خارجی گسترش می یابد و پروازهای ایمن تر و پایدارتر را در شرایط غیرقابل پیش بینی امکان پذیر می کند. با حداکثر سرعت باد 4.5 متر بر ثانیه، PULSAR می تواند موقعیت شناور خود را در یک منطقه کوچک حفظ کند. چنین ویژگی پرواز ایمن تر و پایدارتر را در یک محیط وحشی امکان پذیر می کند.
این حسگر علاوه بر قابلیتهای فوقالذکر، میتواند میدان دید (FoV) را از طریق حرکت خود چرخشی گسترش دهد که درک و کارایی پهپاد را افزایش میدهد. در حال حاضر، دو رویکرد اصلی برای گسترش حسگر FoV وجود دارد، اما هر دوی آنها مقدار قابل توجهی انرژی مصرف میکنند.
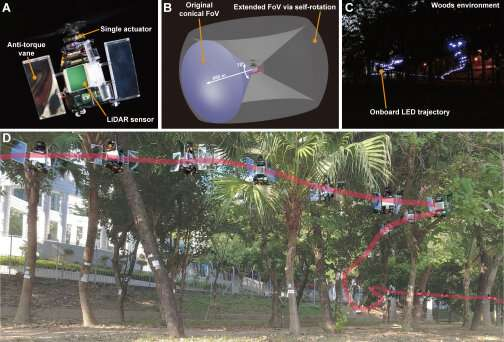
نمای کلی PULSAR، ساختار اصلی، میدان دید حسگر گسترده و پرواز ناوبری مستقل در یک محیط چوبی را نشان میدهد. اعتبار: دانشگاه هنگ کنگ.
اولین رویکرد شامل استفاده از حسگرهایی با FoVهای بزرگ، مانند دوربینهای چشم ماهی، دوربینهای کاتادیوپتریک یا 360 درجه LiDAR است که تمایل به ایجاد اعوجاج دارند. با این حال، 360 درجه LiDAR دارای یک FoV باریک و با وضوح پایین در جهت عمودی است. رویکرد دوم شامل استفاده از سنسورهای متعدد، مانند سیستم چند دوربینی یا چند لیدار است، اما این کار هزینههای بیشتری را به همراه دارد و زمان پردازش دادهها را طولانیتر میکند.
اختراع PULSAR می تواند 26.7 درصد در مصرف انرژی در مقایسه با یک پهپاد کوادروتور با همان مساحت دیسک پروانه و محموله، صرفه جویی کند و در عین حال چابکی خوبی را حفظ کند. به لطف سیستم محرکه تک محرک، PULSAR اتلاف تبدیل انرژی کمتری را تجربه میکند و در نتیجه راندمان پروازی 6.65 گرم بر وات دارد.
این پهپاد 1234 گرمی با وجود اندازه کوچک، با قطر تنها 37.6 سانتی متر و ظرفیت باتری تنها 41 وات ساعت، به زمان شناور بیش از 12 دقیقه دست یافت. با برداشتن سنسور LiDAR و نصب پروانه و باتری بزرگتر، زمان شناور PULSAR را می توان به بیش از 40 دقیقه افزایش داد.
یافته های تحقیق در Science Robotics ارائه شده است.
دکتر ژانگ گفت که پلت فرم تحقیقاتی ایجاد شده توسط تیم او می تواند برای اکتشاف بیشتر پهپادهای خود چرخشی مفید باشد. ما بر این باوریم که تحقیقات روشهای کنترل پهپاد تحت تکنیکهای چرخش پرسرعت و مکانیابی و نقشهبرداری همزمان (SLAM) تحت حرکت تهاجمی را تسهیل میکند.»