6 فوریه 2023 – توسط دانشگاه علوم توکیو
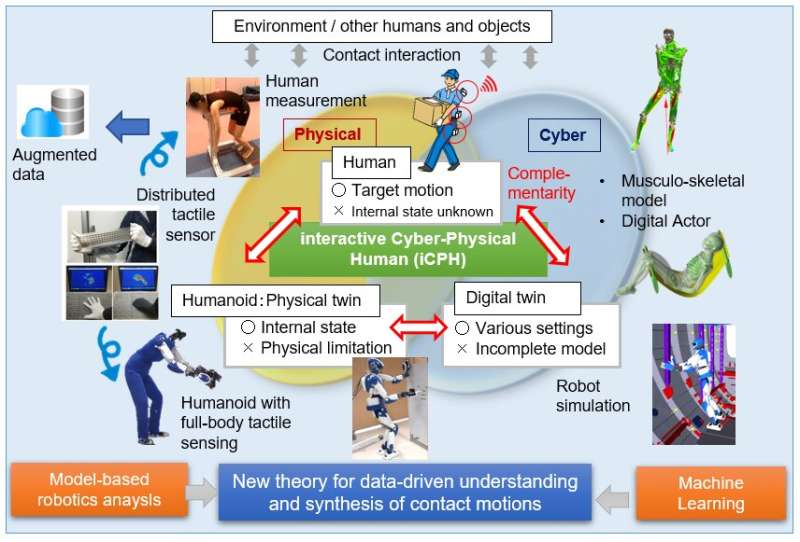
iCPH از دادههای اندازهگیری انسان، تجزیه و تحلیل اسکلتی عضلانی و یادگیری ماشینی استفاده میکند و رباتهای انساننما (دوقلوهای فیزیکی) و شبیهسازیهای روباتی (دوقلوهای دیجیتال) را قادر میسازد تا حرکات تماس انسانمانند را درک، پیشبینی و ترکیب کنند. اعتبار: ایچی یوشیدا از دانشگاه علوم توکیو
انسان ها به طور طبیعی وظایف پیچیده متعددی را انجام می دهند. اینها شامل نشستن، برداشتن چیزی از روی میز و هل دادن گاری است. این فعالیت ها شامل حرکات مختلفی است و نیاز به تماس های متعدد دارد که برنامه ریزی ربات ها برای انجام آنها را دشوار می کند.
اخیراً پروفسور ایچی یوشیدا از دانشگاه علوم توکیو ایده یک پلت فرم تعاملی انسان فیزیکی-سایبری (iCPH) را برای مقابله با این مشکل مطرح کرده است. این می تواند به درک و تولید سیستم های انسان مانند با حرکات کل بدن بدون تماس کمک کند. کار او در Frontiers in Robotics و AI منتشر شد.
پروفسور یوشیدا به طور خلاصه اصول این پلتفرم را شرح می دهد. همانطور که از نام آن پیداست، iCPH عناصر فیزیکی و سایبری را ترکیب می کند تا حرکات انسان را به تصویر بکشد. در حالی که یک ربات انسان نما به عنوان دوقلوی فیزیکی یک انسان عمل می کند، یک دوقلوی دیجیتال به عنوان یک انسان یا ربات شبیه سازی شده در فضای مجازی وجود دارد. دومی از طریق تکنیک هایی مانند مدل سازی شده است. به عنوان تجزیه و تحلیل اسکلتی عضلانی و روباتیک. این دو دوقلو مکمل یکدیگر هستند.”
این تحقیق چندین سوال کلیدی را مطرح می کند. چگونه انسان نماها می توانند حرکت انسان را تقلید کنند؟ چگونه روبات ها می توانند رفتارهای انسان را یاد بگیرند و شبیه سازی کنند؟ و چگونه روباتها میتوانند به طور روان و طبیعی با انسانها تعامل داشته باشند؟ پروفسور یوشیدا در این چارچوب به آنها می پردازد.
ابتدا، در چارچوب iCPH، حرکت انسان با کمی کردن شکل، ساختار، زاویه، سرعت و نیروی مرتبط با حرکت اعضای مختلف بدن اندازهگیری میشود. علاوه بر این، توالی تماس های ایجاد شده توسط انسان نیز ثبت می شود. در نتیجه، این چارچوب اجازه می دهد تا توصیف عمومی حرکات مختلف را از طریق معادلات دیفرانسیل و ایجاد یک شبکه حرکت تماسی که یک انسان نما می تواند بر اساس آن عمل کند.
دوم، دوقلو دیجیتال این شبکه را از طریق رویکردهای مبتنی بر مدل و یادگیری ماشین یاد میگیرد. آنها با روش محاسبه گرادیان تحلیلی به هم متصل می شوند. یادگیری مستمر به ربات شبیه سازی می آموزد که چگونه توالی تماس را انجام دهد. سوم، iCPH شبکه حرکت تماس را از طریق تقویت داده ها غنی می کند و تکنیک کوانتیزاسیون برداری را اعمال می کند. این به استخراج نمادهایی که زبان حرکت تماس را بیان می کنند کمک می کند.
بنابراین، پلت فرم به حرکت تماسی در موقعیت های بی تجربه اجازه می دهد. به عبارت دیگر، روباتها میتوانند محیطهای ناشناخته را کاوش کنند و با استفاده از حرکات صاف که شامل بسیاری از مخاطبین است، با انسانها تعامل داشته باشند.
در واقع، نویسنده سه چالش را مطرح می کند. اینها به توصیفگرهای کلی، یادگیری مداوم و نماد حرکت تماس مربوط می شوند. پیمایش آنها برای تحقق iCPH ضروری است. پس از توسعه، پلتفرم جدید برنامه های کاربردی متعددی خواهد داشت.
دادههای iCPH برای حل مسائل اجتماعی و صنعتی به صورت عمومی منتشر میشود و به مشکلات واقعی زندگی میرسد. روباتهای انساننما میتوانند انسانها را از بسیاری از وظایفی که شامل بارهای شدید هستند رها کرده و ایمنی آنها را بهبود بخشند، مانند بلند کردن اجسام سنگین و کار در محیطهای خطرناک. iCPH همچنین می تواند برای نظارت بر وظایف انجام شده توسط انسان و کمک به جلوگیری از بیماری های مربوط به کار استفاده شود. در نهایت، انسان نماها را می توان از راه دور توسط انسان ها از طریق دوقلوهای دیجیتالی خود کنترل کرد، که به انسان نماها اجازه می دهد تجهیزات بزرگ نصب و حمل و نقل کنند.
استفاده از iCPH به عنوان نقطه صفر و با کمک همکاریهای جوامع تحقیقاتی مختلف، از جمله رباتیک، هوش مصنوعی، علوم اعصاب و بیومکانیک، آیندهای با روباتهای انساننما دور نیست.