10 آگوست 2021، توسط جنیفر چو، موسسه فناوری ماساچوست
مهندسان هوافضا در MIT الگوریتمی را طراحی کردهاند که به پهپادها کمک میکند سریعترین مسیر را در اطراف موانع بدون تصادف پیدا کنند.
اگر مسابقات پهپادی خودران را دنبال میکنید، احتمالاً تصادفات را به اندازه بردها به خاطر میآورید. در مسابقات پهپادی، تیمها با هم رقابت میکنند تا ببینند کدام وسیله نقلیه بهتر آموزش دیده است تا سریعتر در یک مسیر موانع پرواز کند. اما هر چه هواپیماهای بدون سرنشین سریعتر پرواز کنند، ناپایدارتر میشوند و در سرعتهای بالا پیش بینی آیرودینامیک آنها بسیار پیچیده است. بنابراین تصادفات یک اتفاق معمول و اغلب دیدنی است. اما اگر بتوان آنها را سریعتر تحت فشار قرار داد، میتوان از هواپیماهای بدون سرنشین در عملیات حساس به زمان و خارج از مسابقه استفاده کرد، به عنوان مثال برای جستجوی بازماندگان در یک بلای طبیعی.
در حال حاضر، مهندسان هوافضا در MIT الگوریتمی را طراحی کردهاند که به پهپادها کمک میکند سریعترین مسیر را در اطراف موانع بدون تصادف پیدا کنند. این الگوریتم جدید، شبیه سازی پرواز یک هواپیمای بدون سرنشین در یک مسیر موانع مجازی را با دادههای حاصل از آزمایشات یک هواپیمای بدون سرنشین واقعی که از طریق یک دوره در یک فضای فیزیکی پرواز میکند، ترکیب میکند.
محققان دریافتند که یک هواپیمای بدون سرنشین که با الگوریتم خود آموزش دیده است، 20 درصد سریعتر از یک هواپیمای بدون سرنشین که بر روی الگوریتمهای برنامهریزی معمولی آموزش دیده است، از طریق یک مانع ساده پرواز میکند. جالب اینجاست که الگوریتم جدید همیشه یک پهپاد را در طول دوره از رقبای خود جلو نمیانداخت. در برخی موارد، این هواپیما یک پهپاد را برای سرعت بخشیدن به یک مسیر پیچیده انتخاب میکند یا انرژی خود را ذخیره میکند تا سرعت خود را افزایش داده و در نهایت از رقیب خود پیشی بگیرد.
«در سرعتهای بالا، آیرودینامیک پیچیدهای وجود دارد که شبیه سازی آن دشوار است، بنابراین ما از آزمایشات در دنیای واقعی برای پر کردن آن سیاهچالهها استفاده میکنیم تا به عنوان مثال متوجه شویم که بهتر است ابتدا سرعت خود را کم کنیم تا بعدا سریعتر عمل کنیم.» ازرا تال، دانشجوی کارشناسی ارشد در بخش هوانوردی و فضانوردی MIT میگوید: «این رویکرد جامع است که ما از آن استفاده میکنیم تا ببینیم چگونه میتوانیم یک مسیر کلی را در سریعترین زمان ممکن ایجاد کنیم.»
سرتاک کارامان، استادیار هوانوردی و فضانوردی و مدیر آزمایشگاه سیستمهای اطلاعات و تصمیم گیری در MIT، میافزاید: «این نوع الگوریتمها یک گام بسیار ارزشمند برای ایجاد پهپادهای آینده است که میتوانند به سرعت در محیطهای پیچیده حرکت کنند. ما واقعاً امیدواریم که بتوانیم محدودیتها را به گونهای جا به جا کنیم که آنها بتوانند به همان سرعتی که محدودیتهای فیزیکی آنها اجازه میدهد حرکت کنند.»
تیل، کارامان و دانشجوی کارشناسی ارشد MIT Gilhyun Ryou نتایج خود را در مجله بین المللی تحقیقات روباتیک منتشر کردهاند.
جلوههای سریع
آموزش هواپیماهای بدون سرنشین برای پرواز در اطراف موانع نسبتاً ساده است اگر آنها به آرامی پرواز کنند.
ریو میگوید: «هنگامی که سریع پرواز میکنید، تخمین محل و موقعیت دشوار است. ممکن است در ارسال سیگنال به موتور تاخیر ایجاد شود یا افت ناگهانی ولتاژ که میتواند مشکلات دینامیکی دیگری را ایجاد کند. این اثرات را نمیتوان با رویکردهای برنامه ریزی سنتی مدلسازی کرد.»
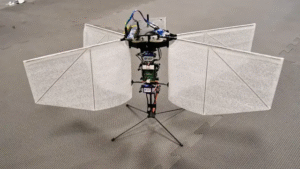
برای درک نحوه تأثیر آیرودینامیک پرسرعت بر هواپیماهای بدون سرنشین در پرواز، محققان باید آزمایشهای زیادی را در آزمایشگاه انجام دهند و پهپادها را با سرعت و مسیرهای مختلف تنظیم کنند تا ببینند که بدون سقوط سریع پرواز میکنند-یک پروسه آموزشی گران قیمت و اغلب باعث تصادف.
در عوض، تیم MIT یک الگوریتم برنامه ریزی پرواز با سرعت بالا ایجاد کرد که شبیه سازیها و آزمایشها را ترکیب میکند، به گونهای که تعداد آزمایشهای مورد نیاز برای شناسایی مسیرهای سریع و ایمن پرواز را به حداقل برساند.
محققان با یک مدل برنامه ریزی پرواز مبتنی بر فیزیک، این مدل را برای شبیه سازی نحوه رفتار یک هواپیمای بدون سرنشین هنگام پرواز در یک مسیر موانع مجازی شبیه سازی کردند. آنها هزاران سناریوی مسابقه را شبیه سازی کردند که هریک مسیر پرواز و الگوی سرعت متفاوتی داشتند. آنها سپس با ترسیم تعیین کردند که آیا هر سناریویی امکان پذیر است (ایمن)، یا غیر ممکن (در نتیجه سقوط). از این نمودار، آنها میتوانند به سرعت تعداد انگشت شماری از امیدوار کنندهترین سناریوها یا مسیرهای مسابقهای را برای آزمایش در آزمایشگاه به صفر برسانند.
برای نشان دادن رویکرد جدید خود، محققان یک هواپیمای بدون سرنشین را در یک مسیر ساده با پنج موانع بزرگ و مربع شکل که در پیکربندی مبهم مرتب شده بودند، شبیه سازی کردند.