اد تارگت15 ژوئیه سال 2020
تیمی از محققان دانشگاه ملی سنگاپور (NUS) می گویند که آنها پوست رباتی بصورت مصنوعی ایجاد کرده اند که می تواند حس لمس را “1000 بار سریعتر از سیستم عصبی حسی انسان را تشخیص دهد و شکل ، بافت و سختی اشیا را 10 برابر سریعتر از چشم به هم زدن عملی کند. “
“پوست الکترونیکی رمزگذاری شده ” (ACES) تیم NUS ، در مقاله ای در Science Robotics در تاریخ 17 ژوئیه 2019 به تفصیل شرح داده شد.
محققان می گویند که این امر می تواند با کاربردهای بالقوه در روبات ها، و همچنین نوروپروتیستیک ، پیامدهای عمده ای برای پیشرفت در تعامل انسان و ماشین و محیط داشته باشد . اینتل همچنین معتقد است که می تواند نحوه استقرار روبات ها در کارخانه ها را به طرز چشمگیری تغییر دهد.
این هفته محققان پیشرفتهای زیادی در Robotics: Science و Systems ارائه دادند ، پس از آنكه این سیستم را با تراشه Intel “Loihi” و استفاده از ترکیب داده های لمسی با داده های بینایی انجام داده ، سپس خروجی ها را از طریق یك شبكه عصبی اجرا كردند. سیستم موجود ، می تواند داده های حسی را 21 درصد سریعتر از یک پردازنده گرافیکی با عملکرد بالا پردازش کند ، در حالی که از میزان قدرت 45 برابر کمتری استفاده می کند.
مایک دیویس ، مدیر آزمایشگاه محاسبات نورومورفیک اینتل گفت: ” نتایج این تحقیق از سوی دانشگاه ملی سنگاپور نگاهی قانع کننده به آینده رباتیک ارائه می دهد که اطلاعات در آن به صورت رویداد محور سنجیده و پردازش می شوند.”
وی اضافه کرد: این کار نشان می دهد که محاسبات عصبی مورب می توانند پس از مهندسی مجدد کل سیستم در سنسورهای پوشا ، قالبهای داده ، الگوریتم ها و معماری سخت افزار به نتایج فزاینده ای دست یابی شود .
اینتل حدس می زند که بازوهای رباتیک متناسب با پوست مصنوعی می تواند “به راحتی با کالاهای تولید شده در یک کارخانه سازگار باشد ، با استفاده از سنجش لمسی برای شناسایی و گرفتن اشیاء ناآشنا با فشار مناسب برای جلوگیری از لغزش عمل کند . توانایی احساس و درک بهتر محیط اطراف می تواند تعامل نزدیکتر و ایمن تری از انسان و روبات را از جمله مشاغل مراقبتی ایجاد کند ، یا اینکه روبات های جراحی احساس لمسی را که امروزه فاقد آن هستند ، به اتوماتیک کردن وظایف جراحی نزدیک تر کند. “
محققان در آزمایش اولیه خود از یک دست رباتیک متناسب با پوست مصنوعی برای خواندن بریل استفاده کرده و داده های لمسی را به فضای ابری منتقل کردند. آنها سپس وظیفه ربات را برای طبقه بندی انواع ظروف مات با استفاده از ورودی های حسی از پوست مصنوعی و یک دوربین ، طبقه بندی کردند.با ترکیب دید مبتنی بر رویداد و لمس ، آنها 10 درصد دقت بیشتری را در طبقه بندی اشیاء نسبت به یک سیستم فقط بینایی فراهم کردند.
استادیار هارولد سوه از گروه علوم رایانه دانشکده محاسبات NUS گفت: ما از این نتایج هیجان زده هستیم. آنها نشان می دهند که یک سیستم عصبی مورب یک گام امیدوار کننده برای ترکیب چندین سنسور برای بهبود درک ربات است. این گامی به سوی ساخت روبات های دارای توان و با قابلیت اعتماد است که می توانند به سرعت و مناسب پاسخ دهند.
پوست ربات چگونه کار می کند.
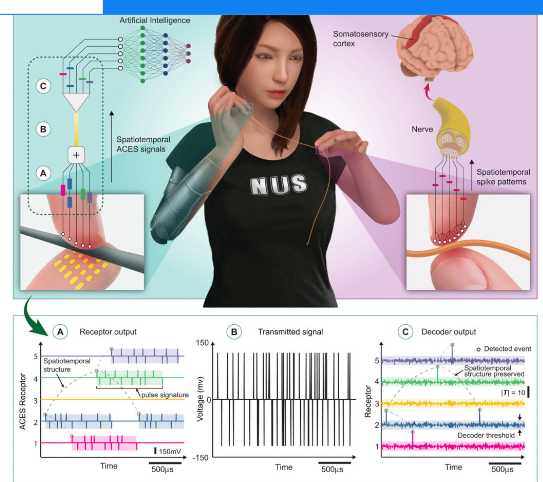
هر سنسور ACES یا “گیرنده” ، اطلاعات محرکها را بصورت غیر همزمان به عنوان “واقعه یا رخداد” با استفاده از پالس های الکتریکی که در زمان قرار دارند ، ضبط کرده و انتقال می دهد.
ترتیب پالسها برای هر گیرنده بی نظیر است ، ماهیت طیف گسترده علایم پالس به چندین حسگر اجازه می دهد بدون هماهنگ سازی زمانی خاص منتقل شوند .علایم پالس ترکیبی را از طریق یک هادی الکتریکی منفرد به رمزگشاها منتقل می کنند. پلتفرم ACES به دلیل استحکام آن در تکمیل علایم ذاتاً ناهمزمان است و نیازی به عنصر واسطه ای نیست که در روشهای فعلی برای مرتب سازی یا درک رویدادهای لمسی مورد استفاده قرار می گیرد.
با اختصار .






