10 دسامبر 2023 -توسط Ingrid Fadelli، Tech Xplore
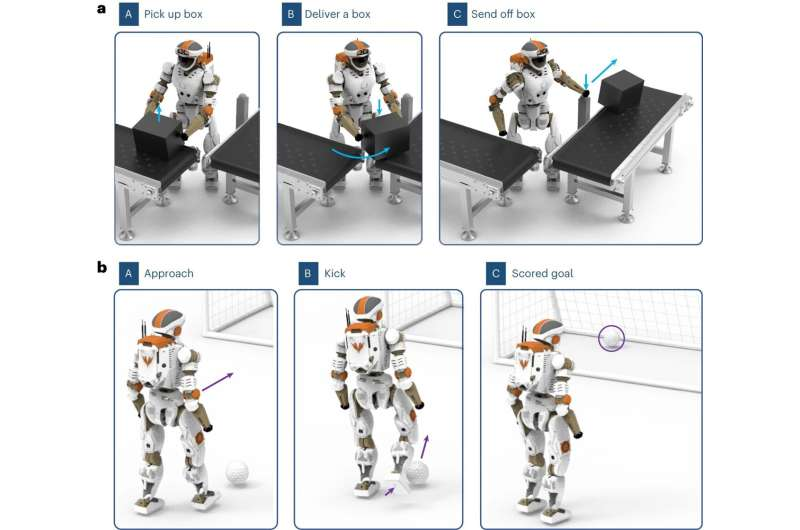
وظایف دستکاری و حرکت برای اعتبارسنجی مدل مولد سلسله مراتبی. a، یک کار دستکاری، که در آن ربات جعبه (A) را برمی دارد، آن را تحویل می دهد (B) و در نهایت با فعال کردن دکمه (C) آن را ارسال می کند. ، bیک ضربه پنالتی، جایی که ربات به توپ (A) نزدیک می شود و آن را به دروازه B و C می زند.
ربات ها برای بهترین حرکت در محیط اطراف خود و مقابله با وظایف روزمره باید بتوانند حرکات پیچیده را انجام دهند و به طور موثر حرکت اعضای بدن را هماهنگ کنند. بنابراین، رباتیکها و دانشمندان کامپیوتر تلاش کردهاند تکنیکهای محاسباتی را توسعه دهند که میتواند بهطور مصنوعی فرآیندی را تکرار کند که از طریق آن انسانها حرکات اعضای مختلف بدن را برنامهریزی، اجرا و هماهنگ میکنند.
یک گروه تحقیقاتی مستقر در آزمایشگاههای اینتل (آلمان)، دانشگاه کالج لندن UCL ، انگلستان، و آزمایشگاه تحقیقاتی VERSES (ایالات متحده) اخیراً به بررسی کنترل موتور رباتهای مستقل با استفاده از مدلهای مولد سلسله مراتبی، تکنیکهای محاسباتی که متغیرها را در دادهها سازماندهی میکنند، پرداختهاند. در سطوح یا سلسله مراتب مختلف، سپس فرآیندهای خاص را تقلید نمود.
مقاله آنها که در Nature Machine Intelligence منتشر شده است، اثربخشی این مدل ها را برای فعال کردن کنترل موتور الهام گرفته از انسان در ربات های خودمختار نشان می دهد.
ژیبین (الکس) لی، نویسنده مقاله، به Tech Xplore گفت: «مقاله اخیر ما بررسی میکند که چگونه میتوانیم از هوش بیولوژیکی برای رسمی کردن یادگیری و کنترل ربات الهام بگیریم.
“این امکان برنامه ریزی حرکت طبیعی و کنترل دقیق حرکات ربات را در چارچوبی منسجم فراهم می کند. ما معتقدیم که تکامل هوش حرکتی ترکیبی تصادفی از توانایی های مختلف نیست. ساختار قشر بینایی، قشر زبان، قشر حرکتی و بنابراین، دلیلی عمیقتر و ساختاری عاقلانه دارد که چرا چنین مکانیزمی برای اتصال مسیرهای عصبی مختلف به طور کلی میتواند به طور مؤثر و کارآمد عمل کند.”
مطالعه اخیر توسط پروفسور ژیبین (الکس) لی و عصب شناس برجسته پروفسور کارل فریستون FMedSci FRSB FRS الهام گرفته از تحقیقات علوم اعصاب، به ویژه آنچه در حال حاضر در مورد هوش بیولوژیکی و کنترل حرکتی در انسان شناخته شده است. این تیم با استفاده از مغز انسان به عنوان مرجع، نرمافزار، یادگیری ماشین و الگوریتمهای کنترلی را توسعه دادند که میتواند توانایی روباتهای هوشمند خودران را برای انجام مطمئن وظایف پیچیده روزانه بهبود بخشد.
“در این مقاله، ما این را با شبیه سازی گسترده خود نشان داده ایم، جایی که یک ربات انسان نما تمام بدن قادر به حمل جعبه، باز کردن درها، کار با امکانات (مانند تسمه نقاله) در یک انبار، فوتبال بازی و حتی ادامه کار است. لی گفت که تحت آسیب فیزیکی بدن ربات قرار گرفته است. “مطالعه ما قدرت طبیعت را نشان می دهد که در آن الهام از نحوه کار قشرهای مختلف در مغز ما می تواند به طراحی مغز ربات های هوشمند کمک کند.”
مانند دیگر مدل های مولد سلسله مراتبی، تکنیک توسعه یافته توسط لی و همکارانش با سازماندهی یک کار در سطوح یا سلسله مراتب مختلف کار می کند. به طور خاص، مدل تیم، هدف فراتر از یک کار را بر روی اجرای حرکات فردی اندام در مقیاسهای زمانی مختلف ترسیم میکند.
لی توضیح داد: «مدلهای مولد پیامدهای اقدامات مختلف را پیشبینی میکنند، در نتیجه به حل انواع/سطوح برنامهریزی و نقشهبرداری صحیح اقدامات مختلف ربات کمک میکنند، که انجام آن نسبتاً سخت و خستهکننده است».
به عنوان مثال، حمل یک جعبه از یک مکان به مکان دیگر به طور طبیعی به یک برنامه جهانی و درشت از راه رفتن به سمت مقصد، همراه با نظارت دقیق تر و کنترل دقیق تر تعادل، و همچنین حمل جعبه ها و قرار دادن جعبه ها نگاشت می شود. این هماهنگی های پیچیده به طور طبیعی همزمان با استفاده از نرم افزار ما اتفاق می افتد.”
محققان رویکرد خود را در مجموعه ای از شبیه سازی ها ارزیابی کردند و دریافتند که به یک ربات انسان نما اجازه می دهد تا به طور مستقل یک کار پیچیده را که مستلزم ترکیبی از اقدامات، از جمله راه رفتن، گرفتن اشیا و دستکاری آنها است، انجام دهد. به طور خاص، این ربات میتواند یک جعبه را در حالی که باز میکند و از آن میگذرد و توپ فوتبال را دور میزند، بازیابی و حمل کند.
لی گفت: «یکی از قابل توجه ترین یافته های کار اخیر ما این است که الهام گرفتن از طبیعت می تواند نقطه شروع بسیار خوبی باشد.
“ما می توانیم در سطح سازمانی شباهت مغز خود الهام بگیریم و طراحی مغز ربات خود را هدایت کنیم، نه اینکه یک طراحی مهندسی را از ابتدا شروع کنیم. مقدار زیادی کار مهندسی وجود دارد که مستقل از الهام گرفته شده از زیست اختراع شده است. با این حال، ما هنوز رباتهای هوشمندی نداریم که بتوانند کارهایی را مانند ما هوشمندانه انجام دهند و فقط از انرژی کمی استفاده کنند، مانند مصرف نان و آب. در عوض، امروزه رباتها از قدرت و محاسبات بسیار زیادی برای انجام کارهای ساده استفاده میکنند.»
یافتههای اولیه جمعآوریشده توسط لی و همکارانش بسیار امیدوارکننده است و این توانایی را برجسته میکند
مجموعه ای از مدل های مولد سلسله مراتبی برای انتقال قابلیت های انسانی به روبات ها آزمایشهای آینده بر روی طیف گستردهای از روباتهای فیزیکی میتواند به تأیید بیشتر این نتایج کمک کند.
لی افزود: «در این مرحله از تاریخ بشر، ما مجموعاً کارهای زیادی را برای تکرار انواع مختلف هوش در سطح انسان به طور جداگانه انجام دادهایم که معادل بخشهای مختلف مغز انسان است.» اکنون میتوانیم از مغز بیولوژیکی از نظر ساختار و سطح سازمانی عملکردها در مورد چگونگی هماهنگی قشرهای مختلف با یکدیگر الهام بگیریم. سپس میتوانیم یک مغز مصنوعی بر اساس نحوه عملکرد مغز انسان در سطح عملکردی طراحی کنیم.
کار اخیر این تیم از محققان به تلاشهای مستمر هوش مصنوعی با هدف نزدیکتر کردن قابلیتهای روباتها به انسانها کمک میکند. لی و همکارانش قصد دارند به اجرای رویکرد پیشنهادی خود برای مهارت های حرکتی واقعی ربات برای کارهای پیچیده و به حداکثر رساندن پتانسیل اجتماعی آن ادامه دهند.
“این مطالعه ما را به مسیری مناسب برای ایجاد AGI (هوش عمومی مصنوعی) با رباتها و تواناییهای فیزیکی تجسم یافته به عنوان شکل جدیدی از نیروهای مولد هدایت میکند که میتواند تمدن ما را به سوی آیندهای روشنتر، تحت حاکمیت خوب و مثبت جامعه هدایت کند. لی افزود، جوامع علمی. در مطالعات بعدی، ما به کار برای تحقق این جاهطلبی ادامه خواهیم داد.»