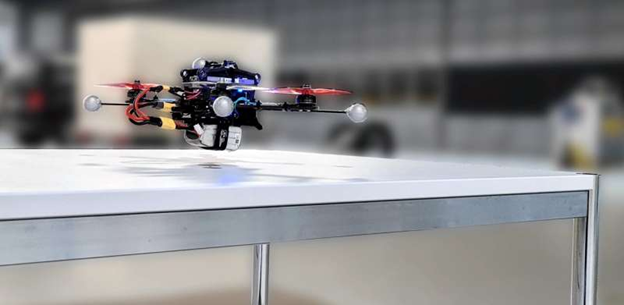
13 مارس 2023 – توسط Ingrid Fadelli- میتوان از MPC عصبی بلادرنگ برای مدلسازی مؤثر اثرات زمینی بسیار پیچیده آئرودینامیکی که در پرواز نزدیک به موانع (جدول) رخ میدهند، استفاده کرد، تنها با استفاده از محاسبات درونی. اعتبار: سالزمن و همکاران
در سالهای اخیر، دانشمندان کامپیوتر الگوریتمهای پیشرفتهتری را برای کنترل حرکات عوامل روباتیک توسعه دادهاند. اینها شامل تکنیکهای کنترل پیشبینی مدل (MPC) میشوند که از مدلی از پویایی عامل برای بهینهسازی رفتار آینده آن نسبت به یک هدف معین استفاده میکنند و در عین حال تعدادی از محدودیتها را برآورده میکنند (مثلاً نمیتوانند با موانع برخورد کنند).
محققان دانشگاه فنی مونیخ و دانشگاه زوریخ اخیراً Real-time Neural MPC را ایجاد کردهاند، چارچوبی که معماریهای مدل پیچیده مبتنی بر شبکههای عصبی مصنوعی (ANN) را در چارچوب MPC برای روباتهای چابک (یعنی کوادروتورها – پهپادها با چهار روتور) ادغام میکند. . این مفهوم که در IEEE Robotics and Automation Letters ارائه شده است، بر اساس رویکرد قبلی توسعه یافته توسط گروه رباتیک و ادراک دانشگاه زوریخ است.
تیم سالزمن و مارکوس رایل محققان گروه سیستم های هوایی خودمختار دانشگاه فنی مونیخ گفتند : «ما با کار عالی گروه روباتیک و ادراک به رهبری دیوید اسکاراموزا مواجه شدیم و بلافاصله شیفته ایده اصلی آنها مبنی بر داشتن مؤلفههای مبتنی بر داده (یادگرفتهشده) برای تقویت الگوریتمهای کنترل «سنتی» شدیم.
پس از اینکه یک اثبات مفهوم برای تعمیم رویکرد آنها، که از فرآیندهای گاوسی (GPs) استفاده میکند، به شبکههای عصبی عمومی (مدلهای یادگیری عمیق) ساختیم، ایده خود را به گروه رباتیک و ادراک در دانشگاه زوریخ ارائه کردیم. از آنجا به بعد، کار فنی و آزمایشات به طور مشترک بین دو آزمایشگاه پیش رفت و جرقه همکاری جدیدی را آغاز کرد.”
چارچوب جدید پیشنهاد شده توسط سالزمن، رایل و همکارانشان، مدلهای یادگیری عمیق و بهینهسازی آنلاین MPC را ترکیب میکند. مدلهای یادگیری عمیق بیانگر از نظر محاسباتی سنگین هستند. با این حال، با تقریب آنها به صورت آنلاین در زمان واقعی، چارچوب میتواند از سختافزار اختصاصی (GPU) برای پردازش کارآمد این مدلها استفاده کند و به سیستم آنها اجازه دهد تا اقدامات بهینه را برای روباتها در زمان واقعی پیشبینی کند.
Salzmann و Ryll توضیح دادند: «چارچوب Real-time Neural MPC امکان ترکیب دو زمینه، کنترل بهینه و یادگیری عمیق را فراهم میکند و در عین حال به هر دو بخش اجازه میدهد تا از چارچوبها و دستگاههای محاسباتی بسیار بهینهشده خود استفاده کنند». “به این ترتیب، ما میتوانیم محاسبات یادگیری عمیق را در PyTorch/Tensorflow روی یک GPU انجام دهیم، در حالی که بهینهسازی کنترل در کد C کامپایل شده روی یک CPU انجام میشود. این امکان استفاده از قدرت یادگیری عمیق را در برنامههایی که قبلاً غیرقابل دستیابی بود، به عنوان مثال یک کوادروتور در کنترل بهینه آنبرد میکند.
محققان چارچوب خود را در یک سری آزمایش، هم در یک محیط شبیه سازی شده و هم در دنیای واقعی ارزیابی می کنند. در این آزمایشها، آنها به طور خاص از آن برای کنترل اعمال یک کوادروتور بسیار چابک در زمان واقعی استفاده میکنند.
نتایج آنها بسیار امیدوارکننده است، زیرا می توانند از قدرت پیش بینی معماری شبکه های عصبی با ظرفیت پارامتری بیش از 4000 برابر بزرگتر از آنچه قبلاً برای کنترل حرکات ربات های چابک در زمان واقعی استفاده می شد، استفاده کنند. آنها همچنین دریافتند که در مقایسه با روشهای MPC معمولی بدون مولفه یادگیری عمیق، چارچوب آنها میتواند خطاهای ردیابی موقعیتی را تا ۸۲ درصد کاهش دهد.
سالزمن و رایل میگویند: «در رباتیک، ما به دنبال مدلهای گویا از دینامیک سیستمهای کنترلشده و تعامل آنها با محیط هستیم (به عنوان مثال، اثرات آیرودینامیکی، اصطکاک لاستیکها و غیره). در حالی که فرمولبندی تحلیلی اینها اغلب دشوار است، رویکردهای مبتنی بر یادگیری، بهویژه شبکههای عصبی، میتوانند پویایی و اثرات متقابل را ثبت کنند. با این حال، دقت مدل با اندازه شبکه عصبی مقیاس میشود. MPC عصبی در زمان واقعی استفاده از عمق را امکانپذیر میکند. مدلهای یادگیری در مقایسه با آنچه قبلاً در کنترل پیشبینی مدل امکانپذیر بود، بسیار قویتر و کارآمدتر است.”
همانطور که توسط پلتفرم Nvidia Jetson اخیراً منتشر شده نشان داده شده است، تراشه های GPU به تدریج راه خود را به سیستم های تعبیه شده پیدا می کنند. چارچوب ایجاد شده توسط این تیم از محققان به زودی به توسعه دهندگان این امکان را می دهد تا از قدرت پیش بینی بالای تکنیک های هوش مصنوعی مبتنی بر داده های پیشرفته برای مدل سازی بهتر پویایی ربات هایی که تراشه های GPU و تعامل آنها با محیط را ادغام می کنند، استفاده کنند و خطر تصادفات را کاهش داده و آنها قابلیت های ناوبری را بهبود بخشند.
سالزمن و رایل افزودند: «مسیرهای باز زیادی برای تحقیقات آینده وجود دارد. یکی از مشکلات رویکردهای یادگیری عمیق این است که خروجی آنها میتواند برای موقعیتهایی که بخشی از دادههای آموزشی نیستند نامنظم باشد (Out Of Distribution OOD)