20 ژوئن 2024 -توسط دانشگاه فنی مونیخ-زمینه های کاربردی برای بازسازی های سه بعدی شامل رانندگی مستقل و حفاظت از بناهای تاریخی است. اعتبار: دانشگاه فنی مونیخ
در سالهای اخیر، روشهای عصبی در بازسازیهای مبتنی بر دوربین رواج یافتهاند. با این حال، در بیشتر موارد، صدها پرسپکتیو دوربین مورد نیاز است. در همین حال، روشهای فتومتریک معمولی وجود دارد که میتوانند بازسازیهای بسیار دقیق را حتی از اجسامی با سطوح بدون بافت محاسبه کنند. با این حال، اینها معمولاً فقط تحت شرایط آزمایشگاهی کنترل شده کار می کنند.
دانیل کرمرز، استاد بینایی کامپیوتر و هوش مصنوعی در TUM و رهبر مرکز یادگیری ماشین مونیخ (MCML) و مدیر موسسه علوم داده مونیخ (MDSI) به همراه تیم خود روشی را توسعه داده است که از این دو رویکرد استفاده می کند.
این یک شبکه عصبی از سطح را با یک مدل دقیق از فرآیند روشنایی ترکیب می کند که جذب نور و فاصله بین جسم و منبع نور را در نظر می گیرد. روشنایی در تصاویر برای تعیین زاویه و فاصله سطح نسبت به منبع نور استفاده می شود.
Cremers می گوید: “این به ما امکان می دهد تا اشیاء را با دقت بسیار بیشتری نسبت به فرآیندهای موجود مدل سازی کنیم. ما می توانیم از محیط طبیعی استفاده کنیم و می توانیم اشیاء نسبتاً بدون بافت را برای بازسازی خود بازسازی کنیم.”
این مقاله بر روی سرور preprint arXiv منتشر شده است و در کنفرانس بینایی کامپیوتری و تشخیص الگو (CVPR 2024) که از 17 ژوئن تا 21 ژوئن 2024 در سیاتل برگزار می شود، ارائه خواهد شد.
کاربردها در رانندگی مستقل و حفظ آثار تاریخی
از این روش می توان برای حفظ آثار تاریخی یا دیجیتالی کردن نمایشگاه های موزه استفاده کرد. اگر با گذشت زمان از بین بروند یا اتفاقی از بین بروند، می توان از تصاویر عکاسی برای بازسازی نسخه های اصلی و ایجاد کپی های معتبر استفاده کرد.
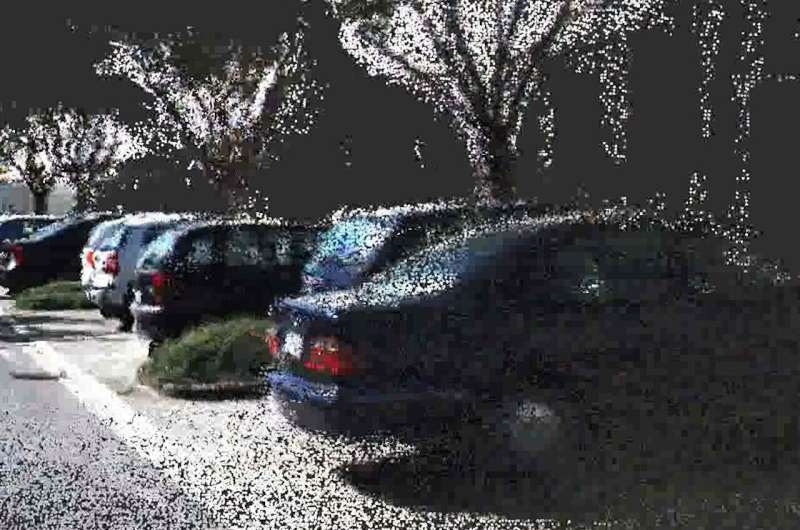
تیم پروفسور Cremers همچنین روشهای بازسازی مبتنی بر دوربین عصبی را برای رانندگی خودمختار توسعه میدهند، جایی که یک دوربین از محیط اطراف خودرو فیلم میگیرد. خودروی خودمختار میتواند محیط اطراف خود را در زمان واقعی مدلسازی کند، یک نمایش سهبعدی از صحنه ایجاد کند و از آن برای تصمیمگیری استفاده کند.این فرآیند مبتنی بر شبکه های عصبی است که ابرهای نقطه سه بعدی را برای تصاویر ویدیویی جداگانه پیش بینی می کند که سپس در مدلی در مقیاس بزرگ از جاده های طی شده ادغام می شوند.