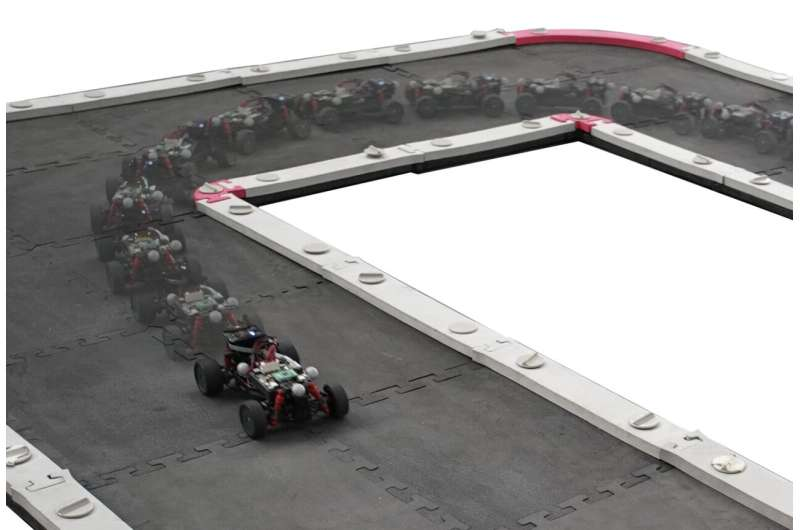
29 آوریل 2024توسط Ingrid Fadelli، آزمایش سخت افزاری توسط محققان انجام شد. اعتبار: Bodmer et al.
توسعه و آزمایش الگوریتمها برای کاربردهای روباتیک معمولاً نیاز به ارزیابی در محیطهای شبیهسازی شده و فیزیکی دارد. با این حال، استقرار برخی الگوریتمها در آزمایشهای سختافزاری ساده، به دلیل هزینههای بالای سختافزار روباتیک یا مشکلات مرتبط با راهاندازی این سختافزار در آزمایشگاههای رباتیک، میتواند دشوار باشد. علاوه بر این، اغلب توسعهدهندگان فاقد نرمافزار قابل اعتمادی هستند که به آنها اجازه میدهد الگوریتمهای خود را در یک پلتفرم روباتیک خاص یکپارچه کنند.
تیمی از محققان مؤسسه سیستمها و کنترل دینامیک ETH زوریخ اخیراً یک ربات مینیاتوری ماشینمانند جدید و یک کیت نرمافزاری مرتبط را معرفی کردهاند که میتواند آزمایش برخی از الگوریتمها را برای برنامههای روباتیک ساده کند. راهحلهای سختافزاری و نرمافزاری آنها که در مقالهای از پیش منتشر شده در arXiv معرفی شدهاند، مقرون به صرفهتر از بسیاری از پلتفرمهای مشابه هستند و راهاندازی آنها در تنظیمات آزمایشگاهی آسانتر است.
سابرینا بودمر، لوکاس ووگل و همکارانشان در مقاله خود نوشتند: “این مقاله یک ربات مینیاتوری ماشین مانند منبع باز با حسگر کم هزینه و خط لوله ای برای شناسایی سیستم مبتنی بر بهینه سازی، تخمین حالت و کنترل ارائه می دهد.” پلتفرم رباتیک کلی با هزینه کمتر از 700 دلار عرضه می شود و بنابراین تأیید الگوریتم های پیشرفته را در یک محیط واقعی به طور قابل توجهی ساده می کند.
سخت افزار توسعه یافته توسط Bodmer، Vogel و همکارانشان، نسخه ارتقا یافته Chronos، یک ربات ارزان قیمت شبیه خودرو است که آنها در کنفرانس بین المللی IEEE 2023 در زمینه رباتیک و اتوماسیون (ICRA) ارائه کردند. نسخه جدید خودروی مینیاتوری ساختار بدنه مشابهی دارد، اما همچنین شامل رمزگذارهای چرخ سفارشی و یک عرشه موقعیت یابی فانوس دریایی است.
داده های جمع آوری شده توسط سنسورهای خودرو می تواند برای تخمین وضعیت خودرو با دقت بالا مورد استفاده قرار گیرد. محققان همچنین سختافزار، نرمافزار و طراحیهای سختافزاری دقیقی را توسعه دادند که میتوانست توسط تیمهای دیگر برای استقرار خودروی خود در آزمایشگاههایشان استفاده شود.
Bodmer، Vogel و همکارانشان نوشتند: “ما همچنین یک مدل دوچرخه اصلاح شده با نیروی تایر Pacejka را برای مدل سازی دینامیک خودروی چهار چرخ محرک در نظر گرفته شده و جلوگیری از تکینگی مدل در سرعت های پایین ارائه می دهیم.” “علاوه بر این، ما یک رویکرد شناسایی سیستم مبتنی بر بهینه سازی و یک طرح تخمین افق متحرک (MHE) ارائه می دهیم.”
قابل ذکر است که پلت فرم رباتیک توسعه یافته توسط Bodmer، Vogel و همکارانشان ماژولار است، به این معنی که می توان آن را برای آزمایش الگوریتم های سیستم های مختلف دیگر، از جمله موشک های مدل و تیم های ربات چند عاملی، تطبیق داد. محققان قبلاً سخت افزار و نرم افزار خود را در چندین آزمایش در دنیای واقعی آزمایش کرده اند که پتانسیل آنها را برای تحقیقات رباتیک تأیید می کند.
Bodmer، Vogel و همکارانشان نوشتند: “در آزمایشهای سختافزاری گسترده، ما نشان میدهیم که رویکرد شناسایی سیستم ارائهشده منجر به مدلی با دقت پیشبینی بالا میشود، در حالی که MHE به تخمین وضعیت دقیق منجر میشود.” در نهایت، عملکرد کلی سیستم حلقه بسته حتی در حضور خرابی سنسور برای بازههای زمانی محدود نیز خوب است.
سختافزار و نرمافزار این تیم در GitHub در دسترس قرار گرفت و به زودی میتوان از آن توسط سایرین در جامعه برای آزمایش الگوریتمهای خود در یک محیط آزمایشگاهی استفاده کرد. هزینه نسبتا پایین ربات جدید و نرم افزار پشتیبانی قابل اعتماد آن در نهایت می تواند آن را به یک پلت فرم رقابتی برای تحقیقات دانشگاهی و کارهای آزمایشگاهی تبدیل کند.