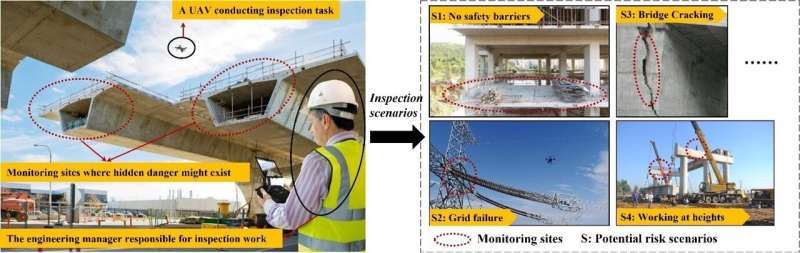
6 مارس 2024 -رویکرد بازرسی مبتنی بر پهپاد دارای مزایای بزرگی برای انجام وظایف بازرسی در یک محیط ساختوساز پیچیده و پرخطر به منظور بررسی مداوم خطرات پنهان بالقوه است. اعتبار: لو ژن، ژیوان یانگ، گیلبرت لاپورته، ون یی، تیانی فن
در مطالعه ای که در Engineering منتشر شده است، یک تیم مشترک از محققان دانشگاه شانگهای و کارشناسان بین المللی از یک رویکرد پیشرفته برای بهینه سازی مسیرهای بازرسی وسایل نقلیه هوایی بدون سرنشین (UAV) و برنامه های پروژه های مهندسی رونمایی کرده اند.
این تحقیق به رهبری لو ژن، ژیوان یانگ، گیلبرت لاپورت، ون یی و تیانی فن، یک مدل برنامهریزی خطی عدد صحیح مختلط (MILP) ابتکاری را معرفی میکند که با الگوریتم جستجوی همسایگی متغیر (VNS) ترکیب شده و رویکرد جدیدی را در رشته مدیریت مهندسی ارایه می دهد.
توسعه سریع و پذیرش فناوری پهپاد، افق های جدیدی را برای صنایع مختلف، به ویژه در مهندسی، که نیاز به روش های بازرسی کارآمد، ایمن و مقرون به صرفه همیشه وجود دارد، باز کرده است. تکنیکهای بازرسی سنتی، اغلب دستی و مملو از خطرات، از پرداختن به پیچیدگیها و خطرات مرتبط با پروژههای مهندسی در مقیاس بزرگ کوتاهی میکنند.
تحقیقات این تیم راه حل پیچیده ای را برای این چالش ارائه می دهد و از چابکی و دقت پهپادها برای انجام بازرسی در کسری از زمان و با کاهش قابل توجه خطر برای بازرسان انسانی استفاده می کند.
قلب این نوآوری در طراحی دقیق مدل MILP و الگوریتم VNS نهفته است که با هم محدودیتهای پیچیده عملیات پهپاد، مانند ظرفیت باتری محدود و مناطق ممنوعه پرواز نظارتی را کنترل میکنند. این چارچوب بهینه سازی پیشرفته نه تنها پوشش جامع مناطق بازرسی را تضمین می کند، بلکه به صورت پویا با شرایط محل تطبیق می یابد و کارایی و ایمنی را به حداکثر می رساند.
این تیم با برجسته کردن کاربرد عملی تحقیقات خود، مطالعه موردی را روی پروژه پل شیزیانگ انجام داد. نتایج توانایی قابل توجه این مدل را برای سادهسازی مسیریابی و زمانبندی پهپاد، شناسایی خطرات بالقوه و مسائل ساختاری در مدت زمان کوتاه نشان داد. این نرم افزار دنیای واقعی بر پتانسیل مدل برای تغییر شیوه های مدیریت مهندسی تاکید می کند و نگاهی اجمالی به آینده بازرسی های مهندسی ارائه می دهد.
با ادامه رشد و تکامل صنعت مهندسی جهانی، تقاضا برای راه حل های نوآورانه مانند بازرسی های مبتنی بر پهپاد افزایش می یابد. این تحقیق نه تنها این تقاضا را برآورده میکند، بلکه چارچوبی مقیاسپذیر، قابل انطباق و قوی برای استفاده از فناوری به منظور افزایش ایمنی و کارایی ارائه میدهد.
مقاله تحقیقاتی کامل، “مسیریابی و زمانبندی بازرسی وسایل نقلیه هوایی بدون سرنشین برای مدیریت مهندسی” کاوش عمیقی از روششناسی، آزمایشها و پیامدهای گستردهتر این پیشرفت را ارائه میدهد که در مهندسی، به عنوان یک منبع ارزشمند برای مهندسان، مدیران پروژه و سیاست گذارانی که به دنبال مهار قدرت فناوری پهپاد برای اقدامات مهندسی ایمن تر و کارآمدتر هستند، عمل می کند.
این مطالعه نقطه عطف مهمی در زمینه مدیریت مهندسی است و راه حل های عملی و خلاقانه ای را ارائه می دهد که نوید انقلابی در بازرسی های مهندسی در سراسر جهان را می دهد. این تحقیق با ترکیبی از دقت آکادمیک و کاربرد در دنیای واقعی، پتانسیل همکاری بین رشتهای را برای رسیدگی به چالشهای پیچیده، ایجاد پیشرفت و نوآوری در صنعت مهندسی و فراتر از آن نشان میدهد.