گزارش 9 نوامبر 2023 – توسط پیتر گراد،
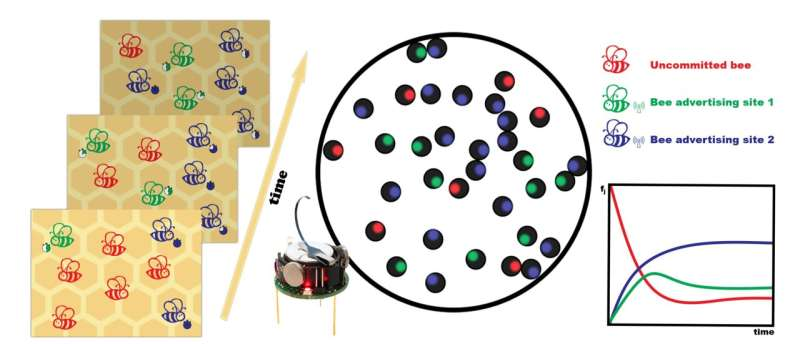
نمایش شماتیک از پویایی تصمیم جمعی تحت بررسی. ستون سمت چپ پویایی مدل تصمیم را نشان می دهد: در یک لحظه معین زنبورهای متعهد وضعیت خود را تبلیغ می کنند تا زنبورهای بلاتکلیف را متقاعد کنند که به گزینه خود متعهد شوند. زمانی که آنها برای تبلیغ گزینه خود صرف می کنند مستقیماً با کیفیتی که برای آن گزینه درک می کنند مرتبط است. با گذشت زمان، انتظار می رود گزینه بهتری ایجاد شود، زیرا از دوره های تبلیغات طولانی تر سود می برد. ستون مرکزی یک نمایش شماتیک از آزمایش های کیلوبات ما را نشان می دهد. هر کیلوبات دارای یک LED است که وضعیت آن را نشان میدهد، خواه متعهد نشده یا متعهد (و برای سایت 1 تبلیغ میکند). اعتبار: arXiv (2023). DOI: 10.48550/arxiv.2310.15592
محققان دانشگاه بارسلونا به کشف شیرینی دست یافتهاند: زنبورهای عسل هنگام مطالعه پویایی رفتار گروهی و تصمیمگیری سوژههای عالی میسازند.
در مطالعهای که اخیرا منتشر شده است، پروفسور M. Carmen Miguel، که قبلاً فعالیت رهبری در میان ماهیها و تعاملات اجتماعی میان دستههای پرندگان را مورد مطالعه قرار داده است، گفت که گروهی از روباتهای کوچک آموزش دیدهاند تا با تقلید از فرآیندهای نمایش داده شده توسط زنبورها به اجماع بر سر وظایف برسند.
رفتار پیچیده زنبورها از دیرباز موضوع مورد توجه محققان بوده است. بیش از 4000 گونه از این حشره وجود دارد و بیش از 100 میلیون سال است که وجود دارند.
محققان بارسلونا ارتشی متشکل از 35 کیلوبات مجهز به پایههای کوچک، چراغهای الایدی، گیرنده نور مادون قرمز و حرکات رقص را طراحی و ساختند .آنها به گونه ای برنامه ریزی شده بودند که تعاملات بین زنبورها را با مهارت هایی مانند تشخیص نور و سیگنال های حرکتی تکرار کنند.هر ربات وظیفه یافت یک مکان بالقوه لانه سازی برای مستعمره و سپس ایجاد اجماع بین ربات های دیگر در نقطه بهینه بود.
رفتار ربات از زنبورهای “پیشاهنگ”، مثل مشاوران املاک در پادشاهی Apis mellifera (زنبورهای عسل) که به طور کلی مسن تر، عاقل تر و آگاه در مورد نقاط اصلی برای ساختن کندوی جدید هستند، مانند سوراخ ها، شکاف ها، یا پیش امدگی لبه بام، الگوبرداری شد و همچنین از یک خانه آنها همچنین به دنبال منابع غذایی هستند.
هنگامی که یک پیشاهنگ یک محل کندو بالقوه را مشاهده می کند، یک “رقص گاگل” انجام می دهد، یک سری حرکات سریع در حال نوسان در ساختاری تقریباً شبیه شکل هشت.رقص درجه مطلوبیت و جزئیات خاصی از کندو یا منبع غذایی بالقوه را نشان می دهد. رقص فاصله و جهت کندو احتمالی از رقص و اگر مربوط به منبع غذایی باشد، نوع و اندازه آن غذا را به زنبورها علامت می دهد.
هر چه سایت مطلوب تر باشد، رقص طولانی تر و مکررتر است.
محققان یک مدل ریاضی که وظیفه مکان یابی کندو را نشان می دهد ابداع کردند. آنها سپس 35 کیلوبات – هر کدام به عرض 3 سانتی متر – را با دستورالعمل هایی برای انتقال “نظرات” خود در مورد یک مکان ایده آل کندو به ربات های همکار خود راه اندازی کردند.
میگوئل در پایان گفت: آزمایشهای ما نشان میدهد که ازدحام کیلوباتها میتوانند به طور جمعی به تصمیمات اجماع به شیوهای غیرمتمرکز و مشابه زنبورهای عسل دست یابند. این عوامل باعث تشکیل یک شبکه ارتباطی نفوذی می شود که از طریق آن هر ربات می تواند اطلاعاتی را فراتر از مجاورت خود دریافت کند.
میگوئل گفت که او معتقد است این مطالعه به توسعه «رباتهای ساده» کمک میکند که تصمیمگیری را به شیوهای غیرمتمرکز و مستقل انجام میدهند.
چنین رباتهای کوچکی میتوانند در حین ردیابی بافت بیماری یا ناهنجاریهای بدن از درون افراد با یکدیگر ارتباط برقرار کنند یا در مأموریتهای جستجو و نجات که برای انسان خطرناک تلقی میشوند، اعزام شوند.
میگل گفت: “با روشن کردن این لایه مهم پیچیدگی، ما بر اهمیت عواملی که معمولاً نادیده گرفته می شوند، اما برای سیستم های زنده و خود زندگی ضروری هستند، تأکید می کنیم.”
مقاله “تصمیم گیری جمعی شبیه زنبور عسل در یک دسته کیلو بات” در سرور پیش چاپ arXiv آپلود شد.