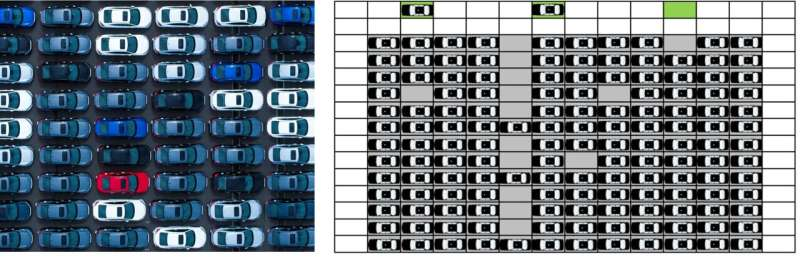
13 فوریه 2023 توسط Ingrid Fadelli، سمت چپ: تصویری از سطح چگالی سیستم گاراژ خودکار پیش بینی شده. راست: انتزاع مبتنی بر شبکه با سه درگاه ورودی/خروجی برای پارک خودرو و بازیابی. اعتبار: Guo and Yu
پیشرفت در زمینه رباتیک و علوم کامپیوتر منجر به ایجاد سیستم های خودکار مختلف با هدف ساده سازی کارهای روزمره شده است. در مناطق شهری و عمدتاً پرجمعیت، این سیستم ها می توانند به افزایش کارایی، کاهش تراکم و بهبود سازمان نیز کمک کنند.
Teng Guo و Jingjin Yu، دو محقق در دانشگاه Rutgers، اخیراً یک سیستم خودکار طراحی کرده اند که می تواند ظرفیت گاراژها را در مناطق شهری افزایش دهد و به توسعه دهندگان شهری کمک کند تا تقاضاهای پارکینگ رو به افزایش را برآورده کنند. این سیستم که در مقاله ای از پیش منتشر شده در arXiv معرفی شده و قرار است در ICRA 2023 ارائه شود، بر چندین ربات و الگوریتم های مختلف برای مدیریت عملیات گاراژ، مانند پارک کردن و بازیابی وسایل نقلیه متکی است.
جینجین یو، یکی از محققانی که این مطالعه را انجام داد، به Tech Xplore گفت: “من در یک کنسرت در شهر نیویورک شرکت می کردم و مجبور شدم ماشینم را در یکی از این گاراژها پارک کنم، جایی که مهماندار کلید را گرفت و وسایل نقلیه را مرتب کرد.” . “این فرآیند زمانبر است، نیاز به دسترسی انسان به ماشین من دارد و مستعد آسیبهای احتمالی است. از آنجایی که آزمایشگاه ما مدتی است الگوریتمهای هماهنگی چند ربات را توسعه میدهد، فکر کردم میتوانیم یک گاراژ فشرده و کارآمد طراحی کنیم که این موارد را از بین ببرد. من این افکار را با تنگ در میان گذاشتم، او سپس سیستم را کنار هم گذاشت.”
هدف اصلی مطالعه اخیر Guo و Yu، ایجاد یک سیستم پارک خودکار بدون دردسر بود که راحت، سریع و کارآمد باشد. طرح پیشنهادی آنها از یک گاراژ پارکینگ 20 طبقه که چند سال پیش در چونگ کینگ در چین نصب شده بود و همچنین سایر سیستم های گاراژ خودکار که در گذشته معرفی شده بودند الهام می گیرد.
آزمایشگاه Yu یک جایزه NSF CAREER و یک جایزه تحقیقاتی آمازون را برای توسعه الگوریتم های هماهنگی چند ربات دریافت کرد که تا حدی این تحقیقات را تامین می کند. سیستم گاراژ خودکار جدیدی که آنها طراحی کردهاند، موارد جدیدی را به مجموعه الگوریتمهای هماهنگی چند روباتی اضافه میکند.
اساساً، این سیستم از یک «دنیای شبکهای» تشکیل شده است که سینیهای متحرکی روی ریلهایی قرار میگیرند که اتومبیلها را به اطراف حمل میکنند. طرح های مشابهی قبلا برای جابجایی جعبه ها و کالاها در داخل انبارها پیشنهاد شده بود.
یو توضیح داد: “این سینی های متحرک با استفاده از یک الگوریتم زمان بندی متمرکز هماهنگ می شوند که قلب سیستم است و تا حد زیادی کارایی کلی سیستم را تعیین می کند.” “یک ویژگی منحصر به فرد سیستم ما این است که می تواند به طور خودکار خودروها را در ساعات کاری “تغییر” دهد تا بازیابی بعدی در زمان های برنامه ریزی شده را تسهیل کند.”
سیستم طراحی شده توسط محققان می تواند فرآیندهای پارکینگ در شهرهای پرجمعیت را تا حد زیادی ساده کند. مشتریان پارکینگ به سادگی باید خودروهای خود را در یک بندر معین رها کنند و بعداً در بندر دیگری منتظر آن باشند.
توانایی آن در چیدمان خودروها بسیار نزدیک به یکدیگر نیز به میزان قابل توجهی ظرفیت گاراژها را افزایش می دهد. علاوه بر این، در حالی که آنها پارک شده اند، ماشین ها برای انسان غیرقابل دسترسی خواهند بود و به طور قابل توجهی خطر سرقت را کاهش می دهند.
یو گفت: «ما نشان میدهیم که طراحی ساده ما بسیار خوب است و الگوریتمهای سریع ما میتوانند به طور موثر کل فرآیند پارک/بازیابی را برنامهریزی کنند. “مفهوم این سیستم باید به یک شکل تحقق یابد، به خصوص که وسایل نقلیه ما به طور فزاینده ای مستقل می شوند. تصور اینکه مجبور باشیم برای پارک ماشین هایمان یا ترک ماشین هایمان مجبور به دور زدن در یک گاراژ باشیم، سخت است. اتومبیلها به دیگران برای پارک کردن در آینده. بنابراین، در آینده، خودمختاری گاراژ یک امر لوکس نیست، بلکه یک ضرورت خواهد بود.»
تا کنون، گوو و یو بر طراحی کلی سیستم طراحی خودکار خود و توسعه الگوریتمهایی که زیربنای عملکرد آن هستند، تمرکز کردهاند. آنها اکنون روی یک نمونه اولیه کار می کنند که به آنها امکان می دهد پتانسیل واقعی آن را در یک محیط واقعی ارزیابی کنند.
یو افزود: “ما اکنون در حال ساختن یک سیستم نمونه اولیه با استفاده از وسایل نقلیه اسباب بازی هستیم تا قابلیت های سیستم خود را نشان دهیم.” هنگامی که این کار انجام شد و نویدبخش بود، قصد داریم نمونه اولیه را به اندازه کامل برسانیم. مطمئناً از درخواستهای اولیه سرمایهگذاران نیز استقبال خواهیم کرد.»







