2 فوریه 2023 -توسط دانشگاه بریستول -RoboSalps در عمل. اعتبار: والنتینا لو گاتو
دانشمندان دانشگاه بریستول از طراحی و زندگی یک زئوپلانکتون مرموز برای توسعه ربات های زیر آب استفاده کرده اند.این واحدهای روباتیک که RoboSalps نامیده می شوند، به نام حیواناتشان، طوری مهندسی شده اند که در محیط های ناشناخته و سخت مانند اقیانوس های فرازمینی کار کنند.
گرچه ماهیها شبیه چتر دریایی با بدن بشکهای شکل نیمه شفاف خود هستند، اما به خانواده Tunicata تعلق دارند و چرخه زندگی پیچیدهای دارند و بین نسلهای منفرد و جمعی تغییر میکنند و در آنجا به هم متصل میشوند تا کلنی را تشکیل دهند.
RoboSalps دارای بدنههای لولهای و سبکی مشابهی است و میتواند به یکدیگر متصل شود و «کلنی ههایی» را تشکیل دهد که به آنها قابلیتهای جدیدی میدهد که تنها به این دلیل که با هم کار میکنند به دست میآیند.
محقق والنتینا لو گاتو از دپارتمان مهندسی هوافضا بریستول این مطالعه را رهبری می کند. او همچنین دانشجوی مرکز آموزش دکتری EPSRC در سیستمهای خودران و رباتیک آینده (FARSCOPE CDT) است.
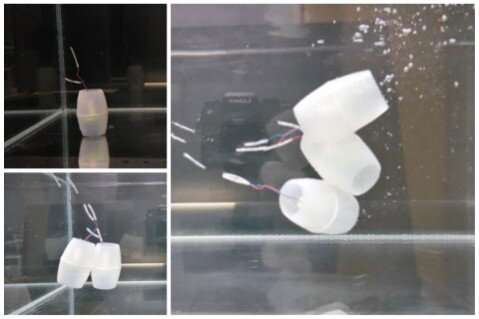
او گفت: “RoboSalp اولین ربات مدولار الهام گرفته از salp است. هر ماژول از یک ساختار لولهای نرم بسیار سبک و یک پروانه هواپیمای بدون سرنشین ساخته شده است که آنها را قادر میسازد شنا کنند. این ماژولهای ساده را میتوان به “کلونی” ترکیب کرد که بسیار زیاد است. قوی تر هستند و پتانسیل انجام وظایف پیچیده را دارند. به دلیل وزن کم و استحکام آنها، آنها برای ماموریت های اکتشافی در زیر آب فرازمینی ایده آل هستند، به عنوان مثال، در اقیانوس زیرسطحی در قمر مشتری اروپا.
RoboSalps منحصر به فرد است زیرا هر ماژول جداگانه می تواند به تنهایی شنا کند. این به دلیل وجود یک موتور کوچک با تیغه های روتور – که معمولاً برای هواپیماهای بدون سرنشین استفاده می شود – در ساختار لوله ای نرم قرار داده شده است.
هنگامی که به تنهایی شنا می کنند، کنترل ماژول های RoboSalps دشوار است، اما پس از پیوستن آنها به یکدیگر برای تشکیل مستعمرات، آنها پایدارتر می شوند و حرکات پیچیده ای از خود نشان می دهند.
علاوه بر این، با اتصال چندین واحد به یکدیگر، دانشمندان به طور خودکار یک سیستم اضافی را به دست می آورند که آن را در برابر شکست قوی تر می کند. اگر یک ماژول خراب شود، کل مستعمره همچنان می تواند حرکت کند.
. RoboSalps نرم، به طور بالقوه کاملاً انرژی کارآمد و به دلیل افزونگی ذاتی قوی هستند. این امر آنها را برای ماموریت های خودمختار که در آن کنترل مستقیم و فوری انسانی ممکن است امکان پذیر نباشد، ایده آل می کند.
دکتر هلموت هاوزر از دپارتمان ریاضی مهندسی بریستول، توضیح داد: “اینها شامل اکتشاف محیط های دور زیردریایی، تونل های فاضلاب و سیستم های خنک کننده صنعتی است. به دلیل وزن کم و نرمی ماژول های RoboSalp، آنها همچنین برای کارهای فوق العاده ایده آل هستند. ماموریت های زمینی. آنها را می توان به راحتی در حجم کم ذخیره کرد که برای کاهش محموله های ماموریت فضایی جهانی ایده آل است.”
یک بدن سازگار همچنین تعامل ایمنتری با اکوسیستمهای بالقوه ظریف، هم روی زمین و هم در خارج از زمین فراهم میکند و خطر آسیبهای محیطی را کاهش میدهد. امکان جدا کردن واحدها یا بخشها و مرتب کردن مجدد آنها، به سیستم قابلیت انطباق میدهد: پس از رسیدن به محیط هدف، کلنی میتواند برای شروع اکتشاف خود مستقر شود.
در یک نقطه خاص، میتواند به بخشهای متعددی تقسیم شود که هر کدام در جهت متفاوتی کاوش میکنند، و پس از آن در پیکربندی جدید برای دستیابی به یک هدف متفاوت مانند دستکاری یا جمعآوری نمونه، دوباره جمع میشوند.
پروفسور جاناتان راسیتر افزود: “ما همچنین در حال توسعه رویکردهای کنترلی هستیم که قادر به بهره برداری از انطباق ماژول ها با هدف دستیابی به حرکات کارآمد انرژی نزدیک به آنچه در سالپ های بیولوژیکی مشاهده شده است.”






