Ingrid Fadelli، -12 سپتامبر 2022
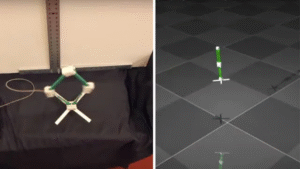
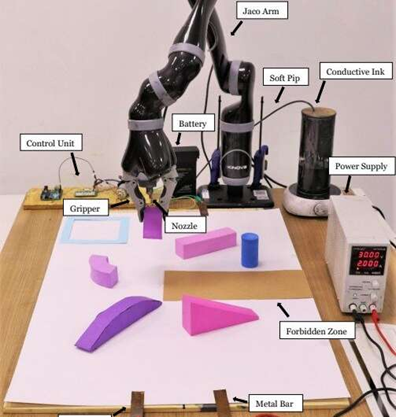
راه اندازی آزمایشی ربات ترسیم مدار. Kinova 6DOF Jaco Arm ابتدا حرکات انتخاب و جابهجایی را در حالت پیشنهادی شبکه انجام میدهد. سپس بازو به سمت یکی از میله های فلزی در 5 سانتی متر بالای مقوا حرکت می کند. کنترلر ROS به طور مداوم نقاط مسیر مسیر مدار محاسبه شده از الگوریتم برنامه ریزی مسیر سه بعدی را ارسال می کند. سپس یک آردوینو وضعیت بازو را از طریق تبلیغ ROS دریافت می کند و روشن/خاموش پمپ پریستالتیک را برای کنترل جریان جوهر تنظیم می کند. اتصال پس از خشک شدن جوهر (30 دقیقه) شروع به نشان دادن رسانایی می کند. اعتبار: Xianglong Tan، Zhikang Liu، Chen Yu، Andre Rosendo،
پیشرفتهای تکنولوژیکی اخیر راه را برای ایجاد سیستمهای روباتیک پیچیدهتر هموار کرده است که برای انجام ماموریتهای مستقل در محیطهای مختلف آشنا و ناآشنا طراحی شدهاند. روباتهایی که در محیطهای نامشخص یا دور کار میکنند، میتوانند از توانایی دریافت فعالانه انرژی الکتریکی از محیط اطراف خود بهرهمند شوند.
محققان موسسه پلی تکنیک Worcester، امپریال کالج لندن و دانشگاه Illinois Urbana Champaign اخیراً یک سیستم رباتیک جدید ایجاد کرده اند که می تواند به صورت بصری محیط اطراف خود را برای دریافت حداکثر انرژی از یک منبع انرژی معین بازآرایی کند. این ربات که در مقاله ای از پیش منتشر شده در arXiv ارائه شده و قرار است در کنفرانس بین المللی IEEE در زمینه رباتیک و بیومیمتیک ارائه شود، با رسم مدارهای الکتریکی با استفاده از جوهر رسانا کار می کند.
آندره روزندو، پروفسوری که این مطالعه را انجام داد، به TechXplore گفت: «کار ما PLOS ONE به عنوان یک آزمایش فکری کاملاً فلسفی شروع شد. نیچه ادعا میکند که غریزه اولیه انسان قدرت است و بقا شرطی است که به طور پیشفرض نمیتوانیم به آن هدف نهایی برسیم. بر اساس این ایده، ما شروع به ابداع تنظیمات تجربی کردیم که در آن ربات ما نه تنها میتواند برای زنده ماندن عمل، بلکه رشد کند.”
آندره روزندو، ژیانگ لونگ تان و ویجی لیو در اولین مطالعه خود که بر این موضوع متمرکز بود، سعی کردند سیستمی را ابداع کنند که بتواند خود را صرفاً با رنگ آمیزی مدارهای الکتریکی تامین کند. در کار جدید خود، آنها این سیستم چاپ مدار را با یک گیره رباتیک ترکیب کردند و رباتی ایجاد کردند که می تواند مجموعه ای از اقدامات را با هدف دستیابی به قدرت بیشتر (یعنی ولتاژهای بالاتر) از محیط خود انجام دهد و در نتیجه در محیط های نامطلوب زنده بماند.
این تیم ربات خود را در شبیهسازی سناریوهای مختلف دنیای واقعی، از جمله کارهایی که در آنها باید از موانع فیزیکی یا مناطقی که مدارهای ترسیم شده آن را متوقف میکنند، اجتناب کند، آزمایش کردند. سپس آنها همچنین ربات را در محیطی واقعی آزمایش کردند تا قابلیت های آن را بیشتر ارزیابی کنند.
Xian توضیح داد: «روبات ما هر آزمایش را با یک باتری شروع میکند و منبع انرژی آن با حرکت کاهش مییابد (و ما همچنین آن را برای تقلید از تلفات انرژی طبیعی ناشی از هموستاز «نشت» میکنیم.» ربات یک سری قسمت های آموزشی مجازی را پشت سر می گذارد، با یک ترمینال قرمز (VCC) که باید به ترمینال قرمز دیگری در نزدیکی بدنش وصل شود، و یک ترمینال سیاه (Ground) که باید با ترمینال سیاه مطابقت داشته باشد تا جریان جریان داشته باشد. می تواند به سمت باتری آن جریان یابد.”
روزندو و همکارانش برای جلوگیری از حرکت ربات خود در یک خط مستقیم ساده، موانعی را در محیط اطراف خود اضافه کردند، چه در آزمایش های شبیه سازی شده و چه در دنیای واقعی. برخی از این موانع، مانند مکعب های فوم، می توانند به راحتی توسط ربات ها برداشته شوند، در حالی که برخی دیگر به یک صفحه اتصال به زمین متصل بودند که با لمس مدار، برق را جمع کرد.
این تیم دریافت که ربات آنها به سرعت و به طور موثر یاد گرفت که بر این موانع غلبه کند تا بتواند زنده بماند و انرژی دریافتی را به حداکثر برساند. این به معنای مرتب کردن مجدد موانع یا پل زدن در نواحی اطراف خود بود که قادر به کشیدن آنها نبود.
روزندو گفت: “من فکر می کنم ما در حال برداشتن گام هایی در جهت رفتارهای سازگارانه برای روبات ها هستیم.” “انسانها قادر به تطبیق، تنظیم رفتار خود برای مطابقت با رفتار مورد نیاز در موقعیت های جدید هستند، و به تدریج با رشد دانش خود بهبود می یابند. ما می توانیم در مورد ورزش، وظایف یا حتی ماموریت های فضایی صحبت کنیم: قبل از اینکه در اوج بازی خود باشیم، ما دوره تامین هزینه های خود را می گذرانیم. تلاشهای اولیه برای درک قوانین جدید برای بهبود و فراتر رفتن. امروزه روباتها برای غلبه بر نقصها تلاش میکنند و یادگیری سازگاری برای حفظ عملکرد خود مهارتی است که آنها باید از ما تقلید کنند.”
ربات تطبیقی ایجاد شده توسط روزندو و همکارانش میتواند مزایای زیادی داشته باشد، زیرا میتواند به طور مستقل انرژی را در محیط اطراف خود به حداکثر برساند و با ایجاد مدارهای الکتریکی جدید به طور مداوم خود را فعال نگه دارد. در آینده، این کار اخیر می تواند الهام بخش توسعه سیستم های روباتیک دیگری باشد که می توانند در محیط های پیچیده بدون نیاز به مدارهای جدید یا نظارت انسان زنده بمانند و رشد کنند.