30 مه 2022 -توسط دانشگاه صنعتی سوئینبرن
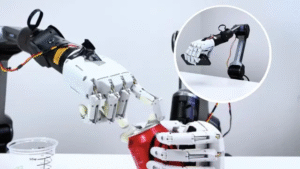
تیم Swinburne یک بازوی روباتی طراحی کرده است تا فرآیند تا کردن بسته اهدای خون را خودکار کند.
پردازش خون تا حد زیادی دستی است.
در یک مرکز پردازش، اهدای خون کامل باید از طریق سانتریفیوژ به اجزای سلولی آن تفکیک شود. برای انجام این کار، بسته خون باید به روش خاصی تا شود تا در طول فرآیند اطمینان حاصل شود که آلودگی باکتریایی وجود ندارد (که به نوبه خود باعث افزایش عمر مفید می شود).
کارکنان برای انجام این عملیات بسیار آموزش دیده اند، اما همچنان خطرات و موارد خطای انسانی وجود دارد. بسته های آسیب دیده یا پاره شده نه تنها منجر به از دست دادن یک هدیه گرانبها می شود، بلکه تولید را مختل می کند و کارکنان را در معرض مواد بیولوژیکی بالقوه خطرناک قرار می دهد. حتی عدم انطباق های ظریف نیز می تواند در طول زمان ایجاد شود و منجر به انحرافات کیفیت شود. از سوی دیگر، چنین حرکات تکراری – گاهی صدها بار در روز – می تواند باعث فشار ارگونومیک و آسیب به کارکنان شود.
آیا یک ربات می تواند این کار را انجام دهد؟
محققان Swinburne برای خودکار کردن فرآیند بارگذاری لوله سانتریفیوژ و تاشو با استفاده از روبات مشترک، سیستمهای بینایی، جیگها و محرکها کار کردهاند.
تا کردن یک روش بسیار پیچیده است که خودکار کردن آن با استفاده از روبات ها چالش برانگیز است. بسته های خونی اشیایی نرم و “تغییر شکل” هستند که می تواند منجر به تغییر قابل توجهی در شکل و هندسه شود. این کار را برای یک ربات یا کامپیوتری که برای هزاران هندسه مناسب نیست دشوار می کند.
در واقع، اتوماسیون دستکاری اجسام قابل تغییر شکل نرم یک موضوع داغ در تحقیقات روباتیک است. به همین دلیل است که IMCRC بسیار مشتاق تأمین مالی این پروژه بود. علاوه بر حسن اجتماعی عملی و تاثیرگذار موفقیت در فضای اهدای خون، میتواند گامی رو به جلو برای اتوماسیون و تولید نوآورانه باشد.
تیم Swinburne به دنبال هر گونه فرصت اتوماسیون در این فرآیند بوده است – تجزیه آن به مراحل کوچکتر و ایجاد موارد احتمالی در طراحی و مهندسی به طوری که طراحی نهایی می تواند شامل ترکیبی از فرآیندهای نیمه خودکار، خودکار یا کمک شود.
کارکنان فرآیند تا شدن مکرر را نشان می دهند که می تواند منجر به آسیب و خطای انسانی شود. این فرآیند سپس توسط یک بازوی ربات، سیستم بینایی و موارد دیگر تکمیل می شود.
در عرض سه ماه، تیم میدانست که نه تنها میتوانند فرآیند را خودکار کنند، بلکه میتوانند به محدوده پروژه نیز بیفزایند.آنها یک بازوی روباتی اثبات شده ساختند که نشان می دهد می توان از اتوماسیون برای تا کردن بسته های جمع آوری خون کامل استفاده کرد. اما آنها همچنین تشخیص تصویر را برای بازرسی کیفیت، ضبط دادهها برای ردیابی، تشخیص ناهنجاری در برچسبها/برچسبهای قرار داده شده دستی و موارد دیگر ساختهاند.
دکتر شانتی کریشنان، سرپرست پروژه و معاون مدیر کارخانه آینده سوینبرن، میگوید: «من از چالش پیدا کردن یک راهحل ابتکاری خودکار برای مشکل فرآیند دستی تکراری در صنعت پزشکی، با استفاده از روباتهای مشترک و سیستم های بینایی ماشین اسستفاده نمودم . من با افتخار می گویم که تلاش تیم اختصاصی تعالی مهندسی و تحقیقات کاربردی در کارخانه آینده سویینبرن منجر به تکمیل موفقیت آمیز اثبات طراحی مفهومی شده است.”
این پروژه همچنین با یک هدف جدید توسعه یافته است: سریعتر کردن ربات. از آنجایی که در حال حاضر سرعت آن بسیار کندتر از انسان است، سرعت گامی حیاتی برای ادغام این فرآیند ایمن تر و دقیق تر خواهد بود.
برای تیم Swinburne، موفقیت در این پروژه پیامدهای گسترده تری دارد.
این یافتهها همچنین میتواند به فرآیندهای مشابه دیگری که شامل اجسام تغییر شکلپذیر نرم میشود- با تأثیر بر مواد غذایی، بهداشت، کشاورزی و سایر صنایع ترجمه شود. اساساً، هر چیزی که با بستهبندی سروکار دارد.»