7 اکتبر 2021، توسط دانشگاه زوریخ
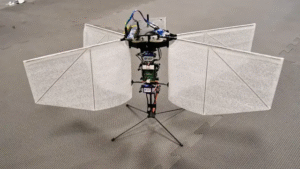
محققان دانشگاه زوریخ رویکرد جدیدی را برای پرواز خودران چهارجانبهها در محیطهای ناشناخته و پیچیده با سرعت بالا و تنها با استفاده از حسگر و محاسبه روی خود توسعه دادهاند. رویکرد جدید میتواند در مواقع اضطراری، در سایتهای ساختمانی یا برای برنامههای امنیتی مفید باشد.
وقتی صحبت از کاوش در محیطهای پیچیده و ناشناخته مانند جنگلها، ساختمانها یا غارها میشود، استفاده از پهپاد دشوار است. آنها سریع، چابک و کوچک هستند و تقریباً در همه جا میتوانند سنسورها و بار حمل کنند. با این حال، به سختی میتوانند راه خود را از طریق محیط ناشناخته بدون نقشه پیدا کنند. در حال حاضر، خلبانان متخصص انسانی برای هدایت پتانسیل کامل پهپادها مورد نیاز هستند.
دیوید اسکاراموزا، سرپرست گروه روباتیک و ادراک در دانشگاه زوریخ، میگوید: «برای تسلط بر پرواز چابک مستقل، باید در چند ثانیه محیط را درک کنید تا پهپاد را در مسیرهای بدون برخورد پرواز دهید. این هم برای انسان و هم برای ماشینها بسیار دشوار است. خلبانان متخصص انسانی میتوانند پس از سالها پشتکار و آموزش به این سطح برسند. اما ماشینها هنوز در تلاش هستند.»
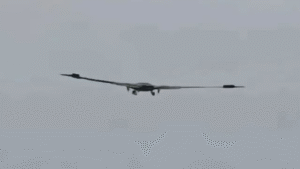
در یک مطالعه جدید، اسکاراموزا و تیمش یک کوادروتور مستقل را آموزش دادهاند تا در محیطهای دیده نشده مانند جنگلها، ساختمانها، ویرانهها و قطارها پرواز کند و سرعت تا 40 کیلومتر در ساعت و بدون برخورد با درختان، دیوارها و موانع دیگر را حفظ کند. همه اینها تنها با تکیه بر دوربینهای مدار بسته و محاسبه به دست آمد.
شبکه عصبی این هواپیمای بدون سرنشین پرواز را با مشاهده نوعی «تخصص شبیه سازی شده» یاد گرفت-الگوریتمی که یک پهپاد رایانهای را در محیط شبیه سازی شده پر از موانع پیچیده به پرواز در آورد. در همه زمانها، الگوریتم اطلاعات کاملی در مورد وضعیت quadrotor و قرائت سنسورهای آن داشت و میتوانست به زمان و قدرت محاسباتی کافی برای یافتن بهترین مسیر کمک کند.
چنین «تخصص شبیه سازی شده» را نمیتوان در خارج از شبیهسازی استفاده کرد، اما دادههای آن برای آموزش نحوه پیش بینی بهترین مسیر بر اساس دادههای حسگرها به شبکه عصبی مورد استفاده قرار گرفت. این یک مزیت قابل توجه نسبت به سیستمهای موجود است، که ابتدا از دادههای حسگر برای ایجاد نقشه محیط استفاده میکنند و سپس مسیرهای درون نقشه را برنامهریزی میکنند-دو مرحله که به زمان نیاز دارد و پرواز با سرعت بالا را غیر ممکن میسازد.
پس از آموزش شبیه سازی، این سیستم در دنیای واقعی مورد آزمایش قرار گرفت، جایی که میتوانست در محیطهای مختلف بدون برخورد با سرعت حداکثر 40 کیلومتر در ساعت پرواز کند. آنتونیو لوکرسیو، دکترا میگوید: «در حالی که انسانها برای آموزش نیاز به سالهای طولانی دارند، هوش مصنوعی با استفاده از شبیهسازهای با کارایی بالا میتواند به سرعت در یک شب به قابلیتهای ناوبری قابل مقایسه برسد.» دانشجوی دکتری و نویسنده مشترک مقاله. الیا کافمن، میافزاید: «جالب اینجاست که این شبیه سازها نیازمند به یک کپی دقیق از دنیای واقعی نیستند. اگر از رویکرد مناسب استفاده کنید، حتی شبیه سازهای ساده نیز کافی هستند.»
برنامههای کاربردی محدود به quadrotors نیستند. محققان توضیح میدهند که همین رویکرد میتواند برای بهبود عملکرد خودروهای خودران مفید باشد، یا حتی میتواند راه را برای آموزش سیستمهای هوش مصنوعی برای عملیات در حوزههایی که جمع آوری دادهها برای آنها دشوار یا غیرممکن است، به عنوان مثال در سایر سیارات، باز کند.
https://techxplore.com