۱۶ اکتبر ۲۰۲۵، عکس از نویسنده: پرابات رانجان میشرا-این سیستم، میانافزار متنباز مبتنی بر ESP32 و نرمافزار کنترل را ادغام میکند.
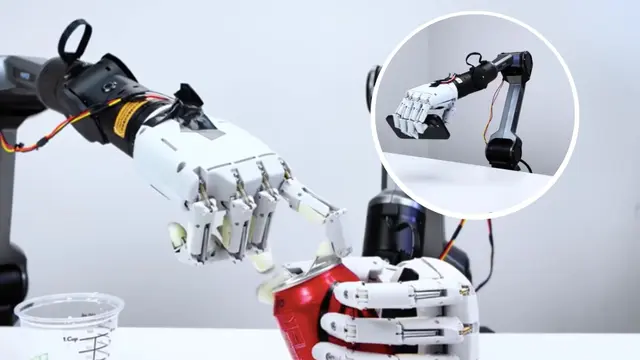
یک شرکت مستقر در کالیفرنیا، یک دست رباتیک معرفی کرده است که میتواند چندین کار را انجام دهد. دست رباتیک متنباز و کمفعال TetherIA با نام Aero Hand Open، قرار است سختترین مشکل صنعت رباتیک، یعنی دستکاری ماهرانه، را حل کند.
شو دونگ، مهندس مسئول TetherIA، گفت: «ما چیزی را که تیم ما با تمام وجود در حال ساخت آن بوده است، به اشتراک میگذاریم: Aero Hand Open – یک دست رباتیک ماهر متنباز و تاندون محور که برای هوش مصنوعی تجسمی ساخته شده است.»
این دست رباتیک در حال گرفتن یک پیچ M5، برداشتن یک آیفون و باز کردن یک قوطی نوشابه با دقت دیده میشود.
شو گفت: «این ترکیبی از دقت + توانایی است که ما به دنبال آن بودهایم – و شما واقعاً میتوانید یکی از آنها را داشته باشید.»
مزیت Aero Hand هنگام برخورد با اشکال غیرمعمول ناشی از تحریک ناقص است.
به جای موتور در هر مفصل، کابلها از میان انگشتان عبور میکنند و اجازه میدهند یک کشش واحد، بخشهای زیادی را به طور همزمان خم کند. شما انطباق را دریافت میکنید – دست به جای مقاومت در برابر اشیاء، با آنها مطابقت پیدا میکند – که در گرفتنهای روزمره مفید است. به گزارش TechEBlog، تیم دونگ، که بر اساس سالها تخصص در کار با رباتهای انساننما ساخته شده است، اجزای داخلی را ساده کرد تا هر کسی با حداقل تجهیزات بتواند آنها را به هم متصل کند.
TetherIA قصد دارد با ارائه یک پلتفرم کاملاً مستند، ماژولار و مقرون به صرفه که میتواند با چاپ سهبعدی استاندارد و قطعات الکترونیکی آماده تولید شود، تحقیقات مربوط به دستکاری ماهرانه را در دسترستر کند.
برخلاف بسیاری از دستهای رباتیک موجود که به محرکهای اختصاصی گرانقیمت یا مجموعههای مکانیکی پیچیده متکی هستند، Aero Hand Open بر سادگی، قابلیت اطمینان و شفافیت تمرکز دارد. هر مفصل با استفاده از تحریک تاندون برای کارایی مکانیکی بهینه شده است و حرکت روان و طبیعی را در عین سبک و جمعوجور نگه داشتن طراحی کلی، امکانپذیر میکند.
این سیستم، میانافزار متنباز مبتنی بر ESP32 و نرمافزار کنترل سازگار با ROS2 را ادغام میکند و امکان ادغام یکپارچه در محیطهای تحقیقاتی و آموزشی را فراهم میکند، طبق جزئیات موجود در GitHub.
این مخزن به عنوان یک مرجع کامل سختافزار و نرمافزار باز برای توسعهدهندگان، دانشجویان و علاقهمندان به رباتیک عمل میکند.دست رباتیک با معماری تاندون محور، حرکت روان و طبیعی را ارائه میدهد.با ساختار کاملاً چاپ سهبعدی، مونتاژ دست رباتیک آسان است. طراحی سبک وزن سیستم به استفاده راحت از آن کمک میکند. نوآوری TetherIA کاملاً مقرون به صرفه است، زیرا یک کیت کامل ۳۱۴ دلار قیمت دارد.
این شرکت فاش کرد که ماژول Teleoperation این سیستم، کنترل از راه دور Aero Hand Open را در زمان واقعی با استفاده از دستکشهای داده + بازوهای رباتیک یا رابطهای رباتیک سازگار امکانپذیر میکند. این ماژول به کاربران اجازه میدهد تا حرکات انگشت انسان را برای آزمایشهای گرفتن و دستکاری شهودی به دست رباتیک نگاشت کنند.
طبق گزارشها، قطعات چاپ سهبعدی سیستم TetherIA ممکن است بسته به تنظیمات چاپگر و مواد، تغییرات تحمل را نشان دهند. مکانیسم تاندون محور برای حفظ حرکت ثابت نیاز به تنظیم منظم تنش دارد. طبق گزارشها، اضافه بار مفاصل یا اعمال گشتاور بیش از حد ممکن است باعث تغییر شکل مکانیکی یا آسیب سروو شود.