۱۷ نوامبر ۲۰۲۵، نیتیکا والتر-فناوری پوشیدنی از حرکات روزمره برای کنترل قابل اعتماد دستگاههای رباتیک حتی در نویز حرکتی بیش از حد استفاده میکند. دیوید بیلوت/دانشگاه کالیفرنیا، سن دیگو
یک سیستم پوشیدنی جدید میتواند حرکات شما را آنقدر دقیق بخواند که بتوانید یک ربات را هنگام دویدن، بالا و پایین پریدن در ماشین یا عبور از امواج متلاطم اقیانوس کنترل کنید.و برای اولین بار، نویز حرکتی که معمولاً این سیگنالها را خراب میکند، دیگر مهم نیست.
مهندسان یک رابط انسان و ماشین نسل بعدی ساختهاند که در شرایط دنیای واقعی کار میکند. این پیشرفت، کنترل مبتنی بر حرکت را به استفاده روزمره، از توانبخشی پزشکی گرفته تا رباتیک زیر آب، نزدیکتر میکند.
این سیستم که در دانشگاه کالیفرنیا، سن دیگو، توسعه یافته است، حسگرهای نرم و کشسان را با یک موتور یادگیری عمیق جفت میکند که دادههای نویزی را در زمان واقعی پاک میکند و یک رابط کاربری قابل اعتماد ایجاد میکند که حرکات طبیعی بازو را تقریباً تحت هر گونه اختلالی تفسیر میکند.سنسورهای حرکتی پوشیدنی معمولاً زمانی که کاربر بیش از حد حرکت میکند، از کار میافتند.
شیانگجون چن، نویسنده همکار، گفت: “فناوریهای پوشیدنی با حسگرهای حرکتی وقتی کاربر ثابت نشسته است، به خوبی کار میکنند، اما سیگنالها تحت نویز حرکتی بیش از حد شروع به از هم پاشیدن میکنند. سیستم ما بر این محدودیت غلبه میکند.”
این فناوری میتواند نحوه تعامل افراد با ماشینها را در محیطهای پرحرکت یا غیرقابل پیشبینی متحول کند.
بیماران دارای محدودیت حرکتی میتوانند از حرکات ساده برای کنترل کمکهای رباتیک بدون حرکت دقیق انگشت استفاده کنند.کارگران صنعتی و امدادگران میتوانند ابزارها یا رباتها را بدون دخالت دست در محیطهای خطرناک کار کنند. حتی غواصان یا اپراتورهای از راه دور نیز میتوانند با وجود جریانهای متلاطم، رباتهای زیر آب را کنترل کنند.ابزارهای مصرفی نیز میتوانند از این مزیت بهرهمند شوند و کنترلهای حرکتی را فعال کنند که در طول حرکات روزمره، از جمله راه رفتن، رانندگی یا ورزش، قابل اعتماد باقی میمانند.
این پروژه نتیجه همکاری بین آزمایشگاههای اساتید شنگ شو و جوزف وانگ در دانشگاه کالیفرنیا، سن دیگو است.
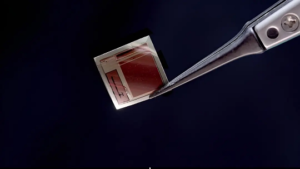
به گفته محققان، این اولین رابط کاربری پوشیدنی انسان و ماشین است که به طور مداوم در چنین طیف وسیعی از اختلالات حرکتی عمل میکند.این وصله الکترونیکی نرم که به یک بازوبند پارچهای چسبانده شده است، حسگرهای حرکتی، حسگرهای عضلانی، یک میکروکنترلر بلوتوث و یک باتری کشسان را در یک بسته نازک و چند لایه ادغام میکند.این وصله سیگنالها را از بازو جمعآوری کرده و آنها را به یک مدل یادگیری عمیق تخصصی تغذیه میکند که تداخل را حذف کرده و حرکت مورد نظر را شناسایی میکند.
چن گفت: “این پیشرفت ما را به رابطهای کاربری انسان و ماشین بصری و قوی که میتوانند در زندگی روزمره به کار گرفته شوند، نزدیکتر میکند.”
این تیم سیستم را در شرایط سخت آزمایش استرس کرد. شرکتکنندگان از آن برای کنترل یک بازوی رباتیک هنگام دویدن، در معرض ارتعاشات فرکانس بالا و تحت ترکیبی از حرکات مختلکننده استفاده کردند.برای فراتر رفتن از محدودیتها، محققان آن را در سناریوهای شبیهسازی شده اقیانوس در داخل شبیهساز تحقیقات اقیانوس-اتمسفر اسکریپس اعتبارسنجی کردند.این تانک، هم حرکت دریایی آزمایشگاهی و هم حرکت دریایی واقعی را بازسازی کرد و این دستگاه پوشیدنی همچنان عملکرد دقیق و با تأخیر کم را ارائه میداد.
الهام اولیه از غواصان نظامی بود که به روشهایی برای کنترل رباتهای زیر آب نیاز داشتند. اما محققان به سرعت متوجه شدند که این چالش جهانی است.
تداخل حرکتی تقریباً تمام فناوریهای پوشیدنی را درگیر کرده و دقت را در زندگی واقعی محدود میکند.
چن گفت: “این کار روش جدیدی برای تحمل نویز در حسگرهای پوشیدنی ایجاد میکند. این روش، راه را برای سیستمهای پوشیدنی نسل بعدی هموار میکند که نه تنها کشسان و بیسیم هستند، بلکه قادر به یادگیری از محیطهای پیچیده و کاربران شخصی نیز میباشند.”
این مطالعه در مجله Nature Sensors منتشر شده است.