۶ آگوست ۲۰۲۵، عکس از نویسنده: نیتیکا والتر-دست موتیف توسط یک تیم دانشجویی USC Viterbi به رهبری پروفسور دانیل سیتا توسعه داده شده است.هانیانگ ژو/USC Viterbi
رباتها غرایز انسانی را درک میکنند: حس کردن گرما، فشار و حتی وزن اشیاء.
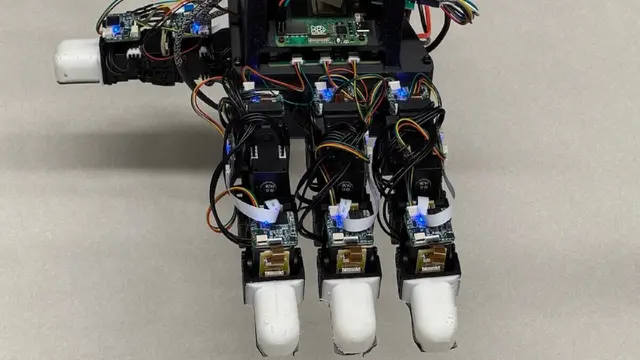
یک تیم دانشجویی در USC Viterbi، با همکاری استادیار علوم کامپیوتر، دانیل سیتا، یک دست رباتیک به نام دست MOTIF ساختهاند.این دست که برای تقلید از نحوه تعامل انسان با جهان طراحی شده است، مجهز به حسگرهایی است که به آن اجازه میدهد نیرو، دما و حرکت را حس کند و گامی بزرگ به سوی بصریتر کردن رباتها بردارد.
سیتا گفت: “ما قبلاً ندیدهایم که کسی این نوع دست را بسازد.”
برخلاف گیرههای سنتی ربات، دست MOTIF چندوجهی است، به این معنی که میتواند چندین نوع ورودی حسی را به طور همزمان جمعآوری و به آنها پاسخ دهد.این شامل فشار، دما و حتی حرکت میشود. این حسها به دست اجازه میدهند تا به وظایفی که در غیر این صورت خودکار کردن آنها دشوار بود، مانند دانستن اینکه چقدر باید چیزی را فشار داد یا از سطح داغ اجتناب کرد، واکنش طبیعیتری نشان دهد.
این ایده ریشه در نحوه تعامل ما، به عنوان انسان، با اشیاء دارد. از کودکی یاد میگیریم که برای بلند کردن یک جعبه چقدر نیرو اعمال کنیم یا چگونه از یک ماهیتابه داغ اجتناب کنیم.
دست MOTIF این تفکر را منعکس میکند. از یک دوربین حرارتی تعبیه شده در کف دست خود برای تشخیص گرما استفاده میکند، دقیقاً مانند زمانی که از دستان خود برای اندازهگیری دما قبل از لمس مستقیم چیزی استفاده میکنیم.
دست MOTIF این تفکر را منعکس میکند. این دست از یک دوربین حرارتی تعبیه شده در کف دست خود برای تشخیص گرما استفاده میکند، دقیقاً مانند زمانی که از دستان خود برای اندازهگیری دما قبل از لمس مستقیم چیزی استفاده میکنیم.
سیتا گفت: «اگر در حال آشپزی باشیم، قابلمهای داریم که بسیار داغ است. ممکن است دست خود را نزدیک آن قرار دهیم تا بررسی کنیم که آیا لمس آن بیخطر است یا خیر. ما میخواستیم همین شهود را به یک سیستم ربات منتقل کنیم.»
این تشخیص حرارتی کاملاً بدون تماس است. با قرار دادن کف دست خود در نزدیکی یک جسم، دست MOTIF میتواند دما را بدون لمس فیزیکی بخواند. این تیم با تعبیه یک دوربین مادون قرمز در کف دست، که اساساً به دست بینایی حرارتی میدهد، به این هدف دست یافت.
هانینگ ژو، نویسنده مشترک مقاله تحقیقاتی و فارغالتحصیل اخیر برنامه علوم کامپیوتر USC، گفت: «ما فکر میکردیم، آیا ممکن است به طریقی خاص سیگنال دریافت کنیم اما چیزی را لمس نکنیم؟»
این دست همچنین با استفاده از حسگرهای تعبیه شده در انگشتان خود، نیرو را تشخیص میدهد. این حسگرها به ربات اجازه میدهند تا اشیاء را با مقدار فشار مناسب فشار دهد، که در تولید، جایی که دقت اهمیت دارد، مفید است.و برای حس کردن وزن، این دست رویکردی شگفتآور و انسانی اتخاذ میکند: یک جسم را تکان میدهد تا بفهمد درون آن چیست، درست مانند کاری که ممکن است با یک بطری آب انجام دهیم.
ژو گفت: «ما به عنوان انسان نمیتوانیم نیرو را به عنوان یک تصویر تشخیص دهیم. شما باید آن را حس کنید. اگر ندانم که یک بطری آب پر از آب است، فقط آن را تکان میدهم.»
دست MOTIF بر اساس دست LEAP، پروژهای که در سال ۲۰۲۳ در دانشگاه کارنگی ملون توسعه داده شد، ساخته شده است. آن طرح متنباز بود – و MOTIF نیز خواهد بود. سیتا و تیمش امیدوارند که این اقدام، همکاری در سراسر جامعه رباتیک را تشویق کند.
سیتا گفت: «پیشرفت تحقیقات متنباز برای پیشرفت جامعه واقعاً مهم است. هر چه افراد بیشتری از دست ما استفاده کنند، برای تحقیقات بهتر است.»
ژو این کار را نه فقط به عنوان یک پروژه یکباره، بلکه به عنوان یک پایه میبیند.او گفت: «ما باید این کار را برای تیمهای تحقیقاتی بیشتر و بیشتری آسان و قابل دسترس کنیم. امیدواریم دیگران نیز بر اساس این پلتفرم کار خود را انجام دهند.»
این یافتهها در Arxiv منتشر شده است.