20 نوامبر 2024 -توسط TransSpread-اعتبار: مجله هوش و تاب آوری زیرساخت (2024). DOI:
عرشه پل فولادی ارتوتروپیک (OSD) برای طراحی پل های با دهانه بلند اساسی است که به دلیل راندمان حمل بار بالا و ویژگی های سبک وزن آن ها ارزشمند است. با این حال، ساختار پیچیده آنها ، آنها را در برابر ترک خوردگی ناشی از خستگی، به ویژه در نقاط اتصال کلیدی آسیب پذیر می کند که خطرات ایمنی جدی را به همراه دارد.
روشهای بازرسی مرسوم، مانند بررسیهای بصری و آزمایش مغناطیسی، اغلب فاقد دقت و قابلیت اطمینان مورد نیاز برای تشخیص ترکهای داخلی یا ظریف هستند. در حالی که تست التراسونیک آرایه فازی (PAUT) وعده داده است، اما به طور کامل این چالش ها را حل نکرده است. با توجه به این مسائل مداوم، نیاز مبرمی به فناوریهای تشخیص ترک پیشرفتهتر و کارآمدتر وجود دارد.
در مطالعهای که توسط تیمهایی از دانشگاه جنوب غربی جیائوتنگ و دانشگاه پلیتکنیک هنگ کنگ انجام شد و در مجله هوش زیرساخت و انعطافپذیری منتشر شد، محققان یک سیستم خودکار برای تشخیص ترک خستگی در OSD با استفاده از یک پلتفرم رباتیک همراه با فناوری آرایه فازی اولتراسونیک معرفی کردند .
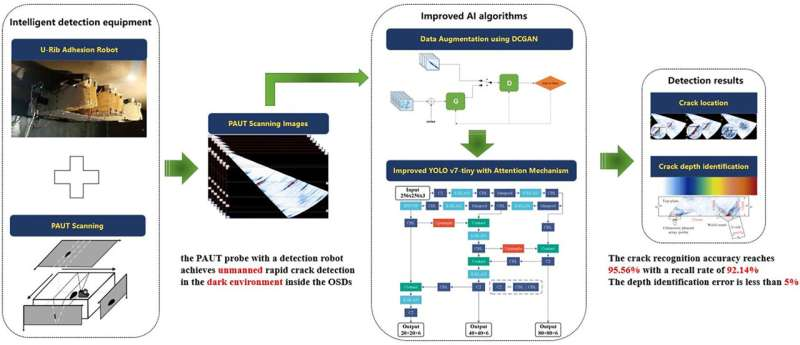
این رویکرد نوآورانه که با مدلهای یادگیری عمیق مانند Deep Convolutional Generative Adversarial Network (DCGAN) برای تولید داده و YOLOv7-tiny برای تشخیص ترک با سرعت بالا و در زمان واقعی بهبود یافته است، بهبود قابلتوجهی در دقت و کارایی ارائه میکند و به طور بالقوه شیوههای تعمیر و نگهداری پل را متحول میکند.
نوآوری اصلی این مطالعه در ادغام اتوماسیون رباتیک با یادگیری عمیق پیشرفته برای تشخیص ترک موثر است. این سیستم روباتیک مجهز به کاوشگر اولتراسونیک آرایه فازی، به طور مستقل OSD ها را اسکن می کند و نیاز به دخالت انسان را به میزان قابل توجهی کاهش می دهد.
محققان از DCGAN برای تقویت مجموعه داده های تصویر PAUT استفاده کردند و قابلیت های یادگیری الگوریتم را تقویت کردند. در میان مدلهای مختلف آزمایششده، YOLOv7-tiny به عنوان مؤثرترین مدل ظاهر شد که سرعت و دقت مطلوبی را برای مکانیابی ترک و تخمین عمق در زمان واقعی ارائه میدهد.
یکی از ویژگی های برجسته این رویکرد، ادغام مکانیسم های توجه است که توانایی YOLOv7-tiny را برای تشخیص حتی ترک های کوچک یا همپوشانی بهبود می بخشد. علاوه بر این، یک روش جدید برای تجزیه و تحلیل شدت اکو برای تخمین دقیق عمق ترک توسعه داده شد که در مقایسه با معیارهای زمان پراش پرواز (TOFD) به حاشیه خطای زیر 5 درصد دست یافت.
این سیستم جامع نه تنها سرعت تشخیص را بهبود می بخشد، بلکه عملکرد میدانی قابل اعتماد را نیز تضمین می کند و استاندارد جدیدی برای نظارت و نگهداری سلامت سازه در زیرساخت های حیاتی ایجاد می کند.
دکتر Hong-ye Gou، محقق ارشد در دانشگاه جنوب غربی جیائوتنگ، اظهار داشت: “تحقیق ما با استفاده از اتوماسیون روباتیک و فناوری های یادگیری عمیق، به نگرانی های کلیدی ایمنی در تعمیر و نگهداری پل می پردازد. نتیجه یک سیستم بسیار کارآمد است که می تواند ترک های خستگی را با دقت بی سابقه ای تشخیص دهد. ، حتی در شرایط چالش برانگیز.
این پیشرفت دارای پتانسیل فوقالعادهای برای افزایش ایمنی زیرساختها است. با شناسایی دقیق ترکهایی که روشهای مرسوم ممکن است نادیده گرفته شوند، رویکرد ما اطمینان حاصل میکند که پلها انعطافپذیرتر هستند و در نهایت از ایمنی عمومی محافظت میکنند و طول عمر این سازههای حیاتی را افزایش میدهند.»
این سیستم تشخیص پیشرفته کاربردهای گسترده ای برای تعمیر و نگهداری زیرساخت و ایمنی دارد. با خودکار کردن بازرسی OSD ها، نیاز به کار دستی را به شدت کاهش می دهد و خطای انسانی را به حداقل می رساند و در عین حال نتایج دقیق و در زمان واقعی را ارائه می دهد.
این فناوری امکان تشخیص زودهنگام مسائل ساختاری را فراهم می کند و از خرابی های فاجعه بار جلوگیری می کند. علاوه بر این، ادغام مدلهای یادگیری عمیق، زمینهای را برای پیشرفتها در نگهداری پیشبینیکننده و نظارت مستمر سلامت ساختاری ایجاد میکند، به طور بالقوه هزینههای تعمیر و نگهداری را کاهش میدهد و طول عمر شبکههای حمل و نقل کلیدی را افزایش میدهد و قابلیت اطمینان آنها را برای نسلهای آینده تضمین میکند.