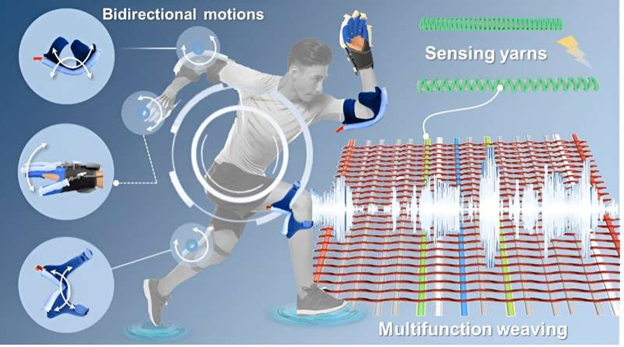
20 آگوست 2024 -توسط Ingrid Fadelli، Tech Xplore-تصویر شماتیک از بافتن رباتیک نرم برای پوشیدنی های مراقبت های بهداشتی. اعتبار: لی و همکاران
در طول چند دهه گذشته، مهندسان الکترونیک دستگاههای انعطافپذیر، همهکاره و بسیار کارآمد را برای طیف وسیعی از کاربردهای دنیای واقعی توسعه دادهاند. برخی از تلاشهای آنها با هدف ایجاد منسوجات هوشمند و حساس بوده است که میتوانند برای ساخت سیستمهای رباتیک کشسان، دستگاههای پزشکی و فناوریهای پوشیدنی مورد استفاده قرار گیرند.
محققان دانشگاه جیانگ نان اخیراً یک رویکرد جدید مهندسی نساجی را برای ساخت محرکهای بافته شده و نرم برای فناوریهای مراقبتهای بهداشتی و سیستمهای روباتیک معرفی کردهاند. استراتژی ساخت پیشنهادی آنها، که در مقالهای در Cell Reports Physical Science بیان شده است، هم مقیاسپذیر و هم به راحتی قابل طراحی است که میتواند به پذیرش در مقیاس بزرگ در آینده کمک کند.
دکتر Fengxin Sun، نویسنده مسئول مقاله، به Tech Xplore گفت : روشهای مرسوم مانند پرینت سه بعدی و ریختهگری الاستومری کاملاً نیاز به سازگاری و راحتی در رباتیک نرم و دستگاههای پوشیدنی را برآورده نمیکنند، به ویژه از نظر توسعه دستگاههای یکپارچه که نه تنها انعطافپذیر و کاربردی هستند، بلکه کمهزینه، به راحتی قابل تنظیم و مقیاسپذیری هستند. ما با الهام از روش تولید نخ به لباس، از فناوری بافت دو سیستمی برای ادغام یکپارچه قابلیتهای حسی و حالتهای تحریک در «لباسهای رباتیک» نرم استفاده کردیم.»
فناوری به کار رفته توسط Sun و همکارانش، نخهای تار و پود (دو جزء اساسی که برای تبدیل نخها به پارچه استفاده میشود) را در حین بافتن به یک طرح مسطح شفاف مرتب میکند. و به این معنی است که امکان سفارشی سازی محرک های بافته شده را فراهم می کند که با برنامه ریزی دقیق ترتیب و ترکیب نخ ها به دست می آید.
دکتر سان گفت: «رویکرد ما شکلدهی شخصیسازی شده و بازخورد حسی بیدرنگ را امکانپذیر میکند، و باعث میشود که محرکهای بافته شده برای کاربردهایی مانند پوشیدنیهای توانبخشی مؤثر باشند. “ساخت نخ حسگر بسیار ساده است، شبیه به ایجاد یک مدل موی بافته شده است. نخ های رسانا با استفاده از یک ماشین بافندگی صنعتی به شکل مارپیچ در اطراف نخ های هسته کشسان بافته می شوند و مسیرهایی برای جریان الکتریکی ایجاد می کنند.”
هنگامی که نخ مورد استفاده برای بافتن محرکها کشیده میشود، به دلیل جدا شدن مارپیچهای نخهای رسانا، مسیرهایی که جریان الکتریکی میتواند از طریق آن جریان یابد، قطع میشود. این تغییر در ساختار به نوبه خود بر سیگنال های الکتریکی جریان یافته از نخ تأثیر می گذارد و بنابراین تشخیص کرنش را امکان پذیر می کند.
دکتر سان گفت: «نخهای حسی که ما توسعه دادیم مستقیماً در پارچه محرکهای بافته شده ما ادغام میشوند. اساساً با حرکت محرک، مقاومت در نخ تغییر میکند و این دادهها میتوانند برای درک نحوه عملکرد محرک مورد استفاده قرار گیرند.»
ویژگی منحصر به فرد نخ های حسگر تولید شده با استفاده از روش تیم این است که به طور کامل در پارچه بافته می شوند. این بدان معنی است که آنها هیچ گونه وزن، سفتی یا حجمی به منسوجات اضافه نمی کنند و به محرک ها اجازه می دهند تا حرکات خود را بدون از دست دادن انعطاف پذیری و سازگاری خود نظارت کنند.
دکتر سان گفت: «به لطف فناوری دو سیستم بافندگی، ما میتوانیم محرکهای بادی بافته شده را طوری تنظیم کنیم که فقط در جهتهای مورد انتظارمان باد شوند، و به طور مؤثر مشکل تورم «بالونمانند» را که جامعه روباتیک نرم با آن مواجه است، برطرف کنیم.
علاوه بر این، استراتژی بافندگی ما راهحلی انعطافپذیر و مقیاسپذیر برای ساخت محرکهای نرم چندشکل، مانند آنهایی که قادر به خم شدن، چرخاندن و مارپیچ شدن دوطرفه تحت یک منبع هوا هستند، با تنظیم تنش، چگالی و ساختار بافته شده نخ ارائه میدهد. “
محققان امکان سنجی نخ خود را برای توسعه محرک های خمشی دوطرفه نشان دادند که می توانند به عنوان گیره های رباتیک نرم استفاده شوند. از این گیره ها می توان برای تقلید حرکات حیوانات استفاده کرد، به عنوان مثال بازتولید امتداد شاخک های اختاپوس برای نزدیک تر کردن اجسام و گرفتن آنها.
دکتر سان گفت: «این محرکها همچنین کاربردهای عملی در دستگاههای توانبخشی پوشیدنی دارند، جایی که میتوانند پشتیبانی دقیقتر و تطبیقیتری را برای افراد با چالشهای حرکتی ارائه دهند. توانایی برنامهریزی این محرکها برای تقلید از حرکات طبیعی انسان به این معنی است که میتوان از آنها در طیف گستردهای از فناوریهای کمکی استفاده کرد و آنها را برای کاربران مؤثرتر و راحتتر کرد.»
در آینده، رویکرد مهندسی نساجی معرفی شده توسط این تیم از محققان می تواند برای تولید طیف گسترده ای از قطعات انعطاف پذیر برای دستگاه های پزشکی و سیستم های رباتیک مورد استفاده قرار گیرد. دکتر سان و همکارانش قصد دارند به کار در جهت پیشرفت تولید نساجی برای کاربردهای تکنولوژیک ادامه دهند و استراتژیهای دیگر بافندگی و بافندگی را ابداع کنند.
دکتر سان افزود: “هدف ما توسعه محرک های نساجی با خروجی بهبود یافته و حرکات همه کاره به روشی کنترل شده تر است.ما معتقدیم که طراحی hierarc را اصلاح می کنیم.
سازههای نساجی به چالشهای کلیدی جامعه روباتیک نرم، مانند متعادل کردن انعطافپذیری و سرسختی در محرکهای نرم، رسیدگی خواهند کرد. این فرآیند میتواند کاربرد بالقوه رباتیک نرم مبتنی بر نساجی را گسترش دهد و تأثیر بیشتری بر زندگی روزمره بگذارد.”













