12 آگوست 2024 -توسط دانشگاه کالیفرنیا، لس آنجلس-متامتریال مستقر نشده (سمت چپ) در هنگام استقرار (مرکز) قدرت و فرم پیدا می کند و توانایی بازگشت به حالت لنگی خود (راست) را دارد. اعتبار: Wenzhong Yan/UCLA
اسباببازیهای عروسکی معمولی به شکل حیوانات و چهرههای محبوب میتوانند با فشار دادن دکمهای در پایین پایه اسباببازیها حرکت کنند یا فرو بریزند. اکنون، تیمی از مهندسان UCLA کلاس جدیدی از مواد پویا قابل تنظیم را ایجاد کردهاند که عملکرد درونی عروسکهای خیمه شب بازی را تقلید میکند، با کاربردهایی برای روباتیک نرم، معماریهای قابل تنظیم مجدد و مهندسی فضا.
در داخل یک عروسک خیمه شب بازی، طنابهای اتصالی وجود دارد که – وقتی محکم کشیده شوند – اسباببازی را سفت میکند. اما با شل کردن این طنابها، «دست و پا» اسباببازی سست میشود. با استفاده از همان اصل مبتنی بر کشش بند ناف که یک عروسک را کنترل میکند، محققان نوع جدیدی از فراماده را توسعه دادهاند، مادهای که برای داشتن خواص با قابلیتهای پیشرفته امیدوارکننده مهندسی شده است.
این مطالعه که در Materials Horizons منتشر شده است، فراماده سبک وزن جدید را نشان میدهد که با سیمهای موتوری یا خودگردان مجهز شده است که از طریق مهرههای به هم پیوسته مخروطی رزوه میشوند. وقتی فعال میشود، طنابها محکم کشیده میشوند و باعث میشوند زنجیره تودرتوی ذرات مهره به هم چسبیده و به صورت یک خط صاف شوند و در عین حال که ساختار کلی خود را حفظ میکنند، مواد سفت میشوند.
این مطالعه همچنین ویژگی های همه کاره این ماده را نشان داد که می تواند منجر به ادغام نهایی آن در رباتیک نرم یا سایر ساختارهای قابل تنظیم مجدد شود:
سطح کشش در طنابها میتواند سفتی سازه بهدستآمده را تنظیم کند – حالت کاملاً کشیده قویترین و سفتترین سطح را ارائه میدهد، اما تغییرات تدریجی در کشش طنابها به سازه اجازه میدهد در حالی که همچنان استحکام را ارائه میدهد، خم شود. نکته کلیدی هندسه دقیق مخروط های تودرتو و اصطکاک بین آنهاست.
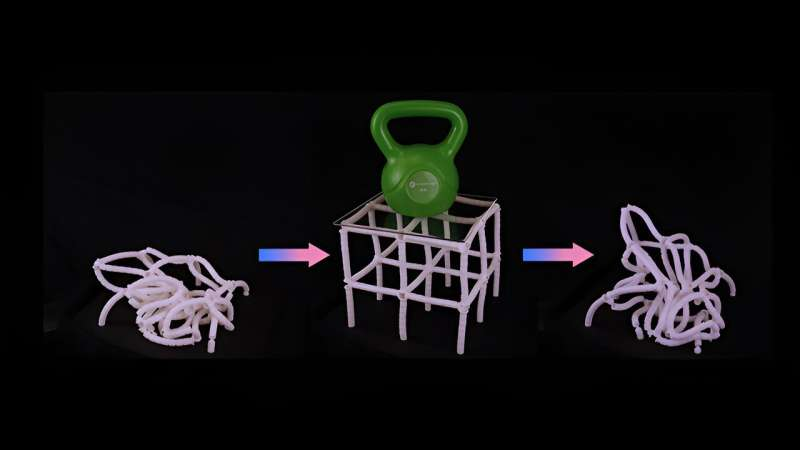
سازههایی که از طرح استفاده میکنند میتوانند بارها و بارها فرو بریزند و سفت شوند و برای طراحیهای طولانیمدت که نیاز به حرکات مکرر دارند مفید باشند. این ماده همچنین حمل و نقل و ذخیره سازی آسان تری را در صورت عدم استقرار و حالت لنگی ارائه می دهد.
پس از استقرار، این ماده قابلیت تنظیم قابل توجهی را نشان می دهد، بیش از 35 برابر سفت تر می شود و قابلیت میرایی آن 50٪ تغییر می کند. این فراماده را میتوان به گونهای طراحی کرد که از طریق تاندونهای مصنوعی که بدون کنترل انسان شکل را ایجاد میکنند، خود را به حرکت درآورد
ونژونگ یان، نویسنده مسئول و محقق فوق دکتری دانشکده مهندسی دانشگاه UCLA Samueli، گفت: «فراماده ما قابلیتهای جدیدی را امکانپذیر میکند و پتانسیل زیادی برای ادغام آن در رباتیک، ساختارهای قابل تنظیم مجدد و مهندسی فضا نشان میدهد. به عنوان مثال، یک ربات نرم خود قابل استقرار که با این ماده ساخته شده است، میتواند سفتی اندامهای خود را برای جابجایی با زمینهای مختلف برای حرکت بهینه و در عین حال حفظ ساختار بدن خود کالیبره کند. این متاماده مستحکم همچنین میتواند به ربات در بلند کردن، هل دادن یا کشیدن اشیا کمک کند. “
یان گفت: «مفهوم کلی فرامواد با بند ناف قراردادی، امکانات جالبی را در مورد چگونگی ساخت هوش مکانیکی در روباتها و سایر دستگاهها باز میکند.
نویسندگان ارشد این مقاله عبارتند از انکور مهتا، استادیار مهندسی برق و کامپیوتر UCLA Samueli و مدیر آزمایشگاه ماشینهای جاسازی شده و رباتهای همه جا که یان عضوی از آن است و جاناتان هاپکینز، استاد مهندسی مکانیک و هوافضا. رهبری گروه تحقیقاتی انعطاف پذیر .
به گفته محققان، کاربردهای بالقوه این ماده همچنین شامل سرپناه های خود مونتاژ شونده با پوسته هایی است که داربست تاشو را در بر می گیرد. همچنین می تواند به عنوان یک کمک فنر جمع و جور با قابلیت های میرایی قابل برنامه ریزی برای وسایل نقلیه در حال حرکت در محیط های ناهموار عمل کند.
مهتا که همچنین دارای یک انتصاب از دانشکده UCLA در رشته مهندسی مکانیک و هوافضا است، گفت: «با نگاهی به آینده، فضای وسیعی برای کاوش در قابلیتهای خیاطی و سفارشیسازی با تغییر اندازه و شکل مهرهها و همچنین نحوه اتصال آنها وجود دارد.
در حالی که تحقیقات قبلی سیمهای انقباضی را بررسی کردهاند، این مقاله به بررسی خواص مکانیکی چنین سیستمی، از جمله اشکال ایدهآل برای همترازی مهرهها، خود مونتاژ شدن و توانایی تنظیم برای حفظ چارچوب کلی آنها پرداخته است.