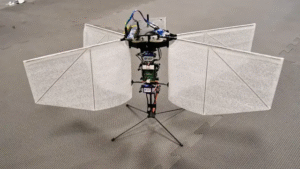
9 آگوست 2024 -توسط Ingrid Fadelli -ربات هوایی که در حین پرواز خارجی دستگیر شد. اعتبار Iriarte و همکاران.
وسایل نقلیه هوایی بدون سرنشین (پهپادها) که معمولاً به عنوان هواپیماهای بدون سرنشین شناخته می شوند، اکنون برای ثبت تصاویر و انجام طیف گسترده ای از ماموریت ها در محیط های بیرونی استفاده می شوند. در حالی که در حال حاضر چندین طرح پهپاد با مزایا و ویژگیهای مختلف وجود دارد، اکثر رباتهای هوایی معمولی عملکرد کمتری دارند، به این معنی که آنها محرکهای مستقل کمتری نسبت به درجات آزادی خود (DoF) دارند.
سیستمهای کم کار اغلب مقرون به صرفهتر هستند و میتوان با استفاده از استراتژیهای کنترلی سادهتر نسبت به سیستمهای دارای بیش فعالی یعنی روباتهایی که محرکهای مستقل بیشتری نسبت به DoF خود دارند کنترل کرد. با این حال، آنها اغلب کمتر قابل اعتماد هستند و قادر به کنترل دقیق موقعیت و جهت گیری خود نیستند.
محققان اتحادیه تحقیقات و فناوری باسک Tecnalia در اسپانیا اخیراً یک ربات هوایی جدید با بیش فعالی ساخته اند که می تواند به طور مستقل موقعیت و جهت بدنه اصلی خود را کنترل کند. این ربات که در مقاله منتشر شده در Robotics and Autonomous Systems معرفی شده است، دارای چهار کوادروتور است که به طور مشترک بدنه مرکزی آن را حمل می کنند.
ایمانول ایریارته، یکی از نویسندگان این مقاله، گفت :”مقاله اخیر ما الهام گرفته از نیاز به فراتر رفتن از مرزهای پهپادها فراتر از وظایف رصد غیرفعال، برای کمک به خودکارسازی وظایفی است که در حال حاضر خطرناک یا گران هستند، مانند کار در ارتفاعات یا مکان های دور. ما به دنبال ایجاد سیستمی بودیم که بتواند به طور فعال با محیط خود تعامل داشته باشد و وظایفی مانند حمل بار، ساختمان تعاونی، بازرسی مبتنی بر تماس یا نگهداری زیرساختها را انجام دهد.»
هدف اولیه کار اخیر Iriarte و همکارانش در Tacnalia طراحی یک ربات هوایی با چندین محرک در تولید نیروی رانش آن بود که بتواند به طور مستقل موقعیت و جهت بدنه مرکزی خود را کنترل کند. رباتی که آنها توسعه دادند شامل یک بدنه اصلی است که از طریق مفاصل جهانی غیرفعال به چهار کوادروتور متصل است.
Iriarte توضیح داد: “کوادروتورها به طور مشترک بدنه اصلی را حمل می کنند که امکان کنترل مستقل شش درجه آزادی بدنه اصلی را فراهم می کند و ربات را قادر می سازد تا مانورهای پیچیده را انجام دهد و با محیط خود به شیوه ای ماهرانه تر تعامل کند.” “مزایای کلیدی سیستم ما قدرت کنترل بالای آن، توانایی آن برای برخاستن و فرود بر روی سطوح شیبدار، و قابلیت های بردار رانش آن است.”
محققان علاوه بر ربات هوایی خود، یک الگوریتم کنترل ad-hoc نیز توسعه دادند که موقعیتها و جهتگیریهای بدنه اصلی را به دستورات سرعت زاویهای برای 16 پروانه ربات تبدیل میکند. این الگوریتم همچنین به طور موثر اغتشاشات خارجی را رد می کند، بنابراین کنترل ربات را بیشتر می کند.
ایریارته گفت: «ربات هوایی ما میتواند شش درجه آزادی بدنه اصلی خود را تنها با استفاده از مکانیسمهای غیرفعال بهطور مستقل ردیابی کند، شاهکاری که ذاتاً برای مولتی روتورهای معمولی غیرفعال است. کاربردهای عملی ربات می تواند بسیار زیاد باشد، از جمله حمل بار، ساخت تعاونی، بازرسی مبتنی بر تماس یا نگهداری زیرساخت ها.
Iriarte و همکارانش تاکنون ربات خود را در مجموعهای از آزمایشهایی که هم در شبیهسازی و هم در محیط واقعی در فضای باز انجام شده است، ارزیابی کردهاند. آنها دریافتند که ربات آنها می تواند به طور مستقل 6 DoF بدنه مرکزی خود را که توسط پهپادهای معمولی دست نیافتنی است، ردیابی کند.
در آینده، ربات محققان می تواند بیشتر بهبود یابد و در طیف وسیع تری از محیط های واقعی آزمایش شود. در نهایت، می توان از آن برای مقابله با ماموریت های پیچیده مختلف که نیاز به کنترل و ردیابی با دقت بالا دارند، استفاده کرد.
Iriarte افزود: “در مطالعات بعدی خود، قصد داریم سطح استقلال ربات را افزایش دهیم و عملکرد و استحکام سیستم را بهبود ببخشیم، همچنین تغییرات معماری مناسب تر برای کارهای خاص را مطالعه کنیم.”