25 آوریل 2023 – توسط پژوهشکده جنوب غرب
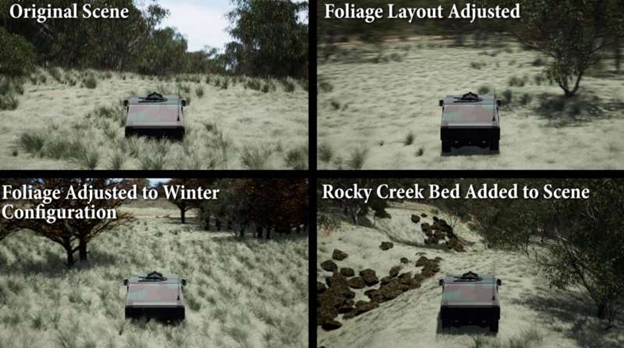
SwRI’s Simulation Scene Adjustment Tool خودروهای خودکار را در شبیه سازی های سه بعدی محیط های خارج از جاده ارزیابی می کند. این تصویر صحنههای سهبعدی را نشان میدهد که شامل پوششهای مختلف زمین، شبیهسازی چمن، شاخ و برگ یا سنگ برای آزمایش واقعی وسایل نقلیه زمینی بدون سرنشین نظامی (UGV) است. اعتبار: پژوهشکده جنوب غرب
موسسه تحقیقاتی Southwest (SwRI) یک ابزار شبیهسازی سه بعدی برای آزمایش وسایل نقلیه خودکار در محیطهای آفرود مجازی با مدلسازی شرایط دنیای واقعی ایجاد کرده است. این تحقیق سرمایهگذاری SwRI را در راهحلهای نرمافزاری در حلقه برای آزمایش وسایل نقلیه متصل و خودکار (CAV) در سناریوهایی از جادههای شلوغ گرفته تا زمینهای خارج از جاده گسترش میدهد. یک محیط شبیهسازیشده یا یک «حلقه نرمافزاری» سهبعدی، از ارزیابیهای تعداد نامحدودی از سناریوها پشتیبانی میکند که آزمایش آنها در دنیای واقعی مقرون به صرفه است.
این فناوری خواستههای وزارت دفاع ایالات متحده برای مدلسازی و ابزارهای شبیهسازی را برآورده میکند تا به توسعه وسایل نقلیه زمینی بدون سرنشین (UGV) کمک کند، اصطلاح نظامی برای وسایل نقلیه خودکار یا خودران.
SwRI یک خط لوله از فناوری با الگوریتم های سفارشی، نرم افزارهای آماده، ابزارهای منبع باز و داده های نقشه عمومی توسعه داد. این پروژه یک “ابزار تنظیم صحنه شبیه سازی” با یک رابط سه بعدی به سبک بازی های ویدئویی برای آزمایش وسایل نقلیه زمینی مجازی در زمین های خارج از جاده توسعه داد. این شبیه ساز همچنین یک دوقلوی دیجیتال ایجاد می کند، یک نمایش مجازی از یک وسیله نقلیه خودکار که شبیه همتای خود در دنیای واقعی به نظر می رسد و رفتار می کند.
شبیه ساز SwRI متشکل از یک موتور گرافیکی، موتور دینامیک، ابزارهای مدلسازی خودرو، مدلهای تعامل با زمین خودرو و پلاگینها برای برقراری ارتباط با پشته نرمافزار مستقل است. صحنه هایی را با نقشه های ارتفاعی می سازد که از داده های سیستم اطلاعات جغرافیایی (GIS) گرفته شده و به صورت گرافیکی ویژگی های توپوگرافی را به صورت سه بعدی ارائه می کند.
دور اول تحقیق، مدلهای ارتفاعی دیجیتال (DEMs) را از اسکنهای هوایی انجامشده توسط سازمان رودخانه سن آنتونیو و سایر سازمانهای دولتی ترکیب کرد.
اوشتر گفت: «ما الگوریتمهایی را برای ایجاد اختلال در دادههای DEM و GIS به روشهای قابل تنظیم توسط کاربر که محیطهای مصنوعی ایجاد میکنند، ایجاد کردیم. این امکان آزمایش الگوریتمها و تکنیکهای جدید در شبیهسازی را فراهم میکند و محیطهای آزمایشی متعددی را ایجاد میکند که ویژگیهای مرتبط خاصی را با یک مکان واقعی جغرافیایی خاص که خودروها در نهایت در آنجا کار خواهند کرد، مشترک هستند.
الگوریتمهای یادگیری ماشین SwRI خروجیهای بینایی و حسی رایانهای را برای لیدار، رادار، دوربینها، GPS و سایر سیستمها شبیهسازی میکنند تا اشیاء صحنه، حرکات و موقعیت را هنگام محاسبه پاسخهای رانندگی درک کنند. یک موتور دینامیک نیروهای ناشی از گرانش و حرکت را شبیه سازی می کند، همانطور که یک مدل وسیله نقلیه در یک محیط حرکت می کند.
وسایل نقلیه شبیه سازی شده را می توان با وزن، سرعت، اسب بخار، مرکز ثقل و سایر مشخصات واقعی برنامه ریزی کرد. یک موتور گرافیکی درختان، چمن، اشیاء زمین و جلوه های بصری مانند آسمان و ابرها را شبیه سازی می کند.
SwRI ایمنی و امنیت را در اولویت توسعه وسایل نقلیه خودران و سیستم های رانندگی خودکار قرار داده است زیرا این فناوری به سطوح پیشرفته آمادگی برای استفاده غیرنظامی و نظامی می رسد.
جری تاولر، دستیار بخش رباتیک SwRI گفت: «اگر به آزمایش میدانی وسایل نقلیه خودکار نگاه کنید، مایل ها یا موقعیت های جدید کافی وجود ندارد که بتوانید به وسیله نقلیه برای مواجهه با تمام لبه های سنسورها و نرم افزارها پرتاب کنید..مدلسازی و شبیهسازی به تست AV و سیستمهای کمک راننده پیشرفته (ADAS) برای افزایش ایمنی و اطمینان از قابلیت قبل و در کنار استقرار در محیطهای آزمایشی در دنیای واقعی کمک میکند.”