17 آوریل 2023 – توسط روبرتو اینچینگولو، پروژه مغز انسان
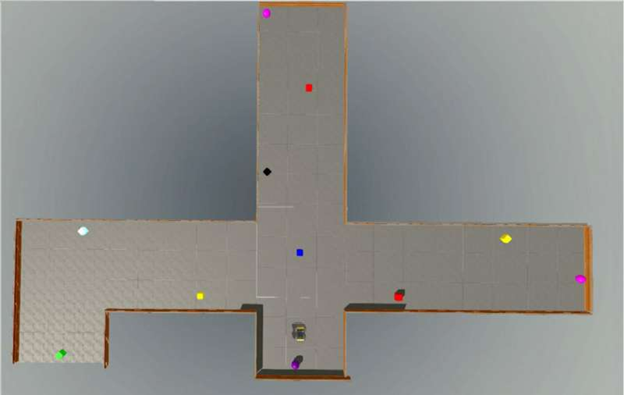
محیط مجازی مورد استفاده برای همه شبیه سازی ها. مکان اشیاء تصادفی است، به جز اشیاء بنفش در سمت راست و بالای بازوها، که نشان دهنده بن بست ها هستند، و شی سبز رنگ در بازوی چپ، که نشان دهنده خروجی است. مریخ نورد شروع به کاوش در پیچ و خم از جسم بنفش تیره در پایین بازو می کند. اعتبار: شبکه های عصبی
محققان HBP در موسسه بیوفیزیک شورای تحقیقات ملی (IBF-CNR) در پالرموی ایتالیا، معماری عصبی و اتصالات هیپوکامپ مغز را تقلید کرده اند تا یک پلت فرم رباتیکی را ایجاد کنند که قادر به یادگیری مانند انسان در حین حرکت ربات در اطراف یک ربات است.
هیپوکامپ شبیه سازی شده قادر است اتصالات سیناپسی خود را در حالی که ربات مجازی شبیه ماشین را به حرکت در می آورد، تغییر دهد. مهمتر از همه، این بدان معنی است که قبل از اینکه بتواند مسیر را به خاطر بسپارد، فقط یک بار باید به یک مقصد خاص حرکت کند. این یک پیشرفت قابل توجه نسبت به روشهای ناوبری مستقل فعلی است که بر یادگیری عمیق متکی هستند و به جای آن باید هزاران مسیر ممکن را محاسبه کنند.
میشل میگلیور و سیمون کاپولینو از IBF-CNR که یافتههای خود را در مجله شبکههای عصبی منتشر کردند، توضیح میدهند:
سیستمهای ناوبری دیگری وجود دارند که نقش هیپوکامپ را شبیهسازی میکنند که به عنوان یک حافظه فعال برای مغز عمل میکند. با این حال، این اولین باری است که میتوانیم نه تنها نقش، بلکه معماری هیپوکامپ را درتک تک سلولهای عصبی و اتصالات آنها نیز تقلید کنیم..
ما آن را با استفاده از بلوکهای ساختمانی و ویژگیهای شناختهشده در ادبیات ساختیم – مانند نورونهایی که برای اشیاء، اتصالات خاص و شکلپذیری سیناپسی کدگذاری میکنند.».
محققان با الهام گرفتن از زیست شناسی، توانستند از مجموعه قوانین متفاوتی برای ناوبری نسبت به قوانینی که توسط سیستم عامل های یادگیری عمیق استفاده می شود، استفاده کنند.
برای رسیدن به یک مقصد مشخص، یک سیستم یادگیری عمیق، مسیرهای ممکن را بر روی نقشه محاسبه میکند و هزینههای آنها را تعیین میکند و در نهایت کم هزینهترین مسیر را برای دنبال کردن انتخاب میکند. این به طور موثر مبتنی بر آزمون و خطا است و نیاز به محاسبه گسترده دارد: دههها مطالعه به کاهش میزان کار برای سیستم اختصاص یافته است.
محققان توضیح می دهند: “برعکس، سیستم ما محاسبات خود را بر اساس آنچه می تواند به طور فعال از طریق دوربین خود ببیند، استوار می کند.” “هنگامی که در راهروی T شکل حرکت می کند، موقعیت نسبی نشانه های کلیدی (در این مورد، مکعب های رنگی) را بررسی می کند. ابتدا به طور تصادفی حرکت می کند، اما زمانی که بتواند به مقصد خود برسد، نقشه ای را بازسازی می کند که نورون ها را دوباره مرتب می کند. به هیپوکامپ شبیه سازی شده خود و اختصاص دادن آنها به مکان های دیدنی. فقط باید یک بار آموزش ببیند تا بتواند به یاد بیاورد که چگونه به مقصد برسد.”
این بیشتر شبیه نحوه حرکت انسان ها و حیوانات است – وقتی از یک موزه بازدید می کنید، ابتدا در آن مکان پرسه می زنید، بدون اینکه راه خود را بشناسید، اما اگر بعد از آن نیاز به بازگشت به یک نمایشگاه خاص داشته باشید، بلافاصله تمام مراحل مورد نیاز را به خاطر می آورید. هم پلتفرم رباتیک و هم شبیهسازی هیپوکامپ ابتدا از طریق زیرساخت تحقیقاتی دیجیتال EBRAINS پیادهسازی شدند که سپس به محققان اجازه ساخت و آزمایش یک ربات فیزیکی در یک راهرو واقعی را داد.
“تشخیص اشیا بر اساس ورودی بصری از طریق دوربین ربات بود، اما در تئوری میتوان آن را بر اساس صدا، بو یا حرکت کالیبره کرد: بخش مهم مجموعه قوانین ناوبری الهام گرفته از بیولوژیکی است که میتواند به راحتی با محیطها و ورودیهای متعدد سازگار شود. “
یکی دیگر از اعضای آزمایشگاه Giuseppe Giacopelli، در حال حاضر در حال کار بر روی ساخت این سیستم برای استفاده صنعتی با رمزگذاری برای تشخیص اشکال خاص است می گوید: «روباتی که در یک انبار کار می کند می تواند خود را کالیبره کند و بتواند موقعیت قفسه ها را تنها در چند ساعت به خاطر بسپارد. یک امکان دیگر کمک به افراد کم بینا، به خاطر سپردن محیط خانگی و ایفای نقش به عنوان یک سگ راهنمای رباتیک است.