12 آوریل 2023 -توسط موسسه مطبوعاتی فناوری پکن، دانشمندان دانشگاه اوزاکا یک سوسک سایبورگ طراحی کردند و با استفاده از تحریک خودکار مبتنی بر یادگیری ماشینی، حرکت آن را بهینه کردند.
آیا تا به حال فکر کرده اید که چرا برخی از حشرات مانند سوسک ها ترجیح می دهند در تاریکی بمانند یا حرکت را کاهش دهند؟ برخی ممکن است به شما بگویند که به آن فوتوفوبیا می گویند، عادتی که عمیقاً در ژن های آنها رمزگذاری شده است. یک سوال دیگر این است که آیا میتوانیم این عادت سوسکها را اصلاح کنیم، یعنی حرکت در تاریکی همانطور که در پسزمینههای روشن حرکت میکنند؟
دانشمندان دانشگاه اوزاکا ممکن است با تبدیل یک سوسک به سایبورگ به این سوال پاسخ داده باشند. آنها تحقیقات خود را در مجله Cyborg and Bionic Systems منتشر کردند.
با میلیون ها سال تکامل، حیوانات طبیعی دارای قابلیت های برجسته ای برای بقا و رشد در محیط های متخاصم هستند. در سالهای اخیر، این حیوانات الهامبخش رباتیکها بودهاند تا ماشینهای خودکاری را توسعه دهند تا بخشی از این قابلیتهای خاموششده، یعنی رباتهای بیومیمتیک الهامگرفته از بیولوژیک را خلاصه کنند.
جایگزینی برای این مسیر، ساخت مستقیم ماشینهای قابل کنترل بر روی این حیوانات طبیعی با کاشت الکترودهای تحریک در مغز یا سیستم عصبی محیطی آنها برای کنترل حرکت آنها و حتی دیدن آنچه میبینند، به اصطلاح سایبورگ است. در میان این مطالعات، حشرات سایبورگ به دلیل در دسترس بودن، مسیرهای عصبی-عضلانی سادهتر و عملکرد آسانتر برای تحریک نفوذی سیستم عصبی محیطی یا ماهیچههایشان، توجه روزافزونی را به خود جلب میکنند.
سوسک ها توانایی حرکتی شگفت انگیزی دارند که به طور قابل توجهی از هر روبات بیومیمتیک با اندازه مشابه بهتر است. بنابراین، سوسکهای سایبورگ مجهز به چنین حرکت چابکی برای مأموریتهای جستجو و نجات در محیطهای ناشناخته و بدون ساختار مناسب هستند که روباتهای سنتی به سختی میتوانند به آن دسترسی داشته باشند.
کیسوکه موریشیما، نویسنده این مطالعه، متخصص رباتیک از گروه مهندسی مکانیک دانشگاه اوزاکا، توضیح داد: “سوسک ها ترجیح می دهند در مناطق تاریک و باریک بیش از مناطق روشن و جادار بمانند. علاوه بر این، آنها تمایل دارند در محیط های گرم تر فعال باشند.” رفتارهای طبیعی مانع از استفاده سوسکها در محیطهای ناشناخته و زیر آوار برای کاربردهای جستجو و نجات میشود. استفاده از یک دوربین پخش زنده کوچک متصل به آنها در مناطق تاریک یا بدون نور برای اهداف نظارت در زمان واقعی دشوار خواهد بود. “
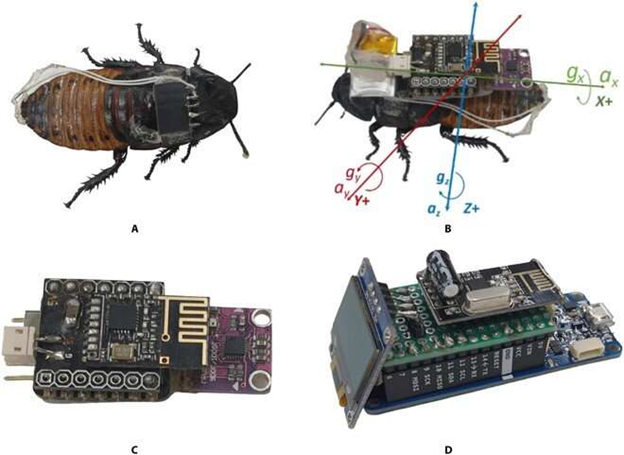
موریشیما گفت: “این مطالعه با هدف بهینه سازی عملکرد حرکت سوسک سایبورگ انجام شده است.” برای این منظور، آنها یک رویکرد مبتنی بر یادگیری ماشینی را پیشنهاد کردند که به طور خودکار وضعیت حرکت این سوسک سایبورگ را از طریق اندازهگیریهای IMU تشخیص میدهد. اگر سوسک در تاریکی یا محیط خنک تر متوقف شود یا یخ بزند، تحریک الکتریکی به مغز آنها اعمال می شود تا آن را به حرکت درآورد.
محمد آریانتو، همکار موریشیما از دپارتمان مهندسی مکانیک دانشگاه اوزاکا گفت: با این آشکارساز آنلاین، تحریک به حداقل می رسد تا از خستگی سوسک ها به دلیل تحریکات زیاد جلوگیری شود.
این ایده برای محدود کردن تحریک الکتریکی در شرایط ضروری، که توسط الگوریتمهای هوش مصنوعی از طریق اندازهگیریهای داخلی تعیین میشود، به طور شهودی امیدوارکننده است. ما مجبور نیستیم سایبورگ را مانند یک روبات کنترل کنیم. آنها می توانند تا حدودی استقلال داشته باشند، که اساس حرکت چابک آنها است. به عنوان مثال، در یک سناریوی نجات، ما فقط باید سوسک را تحریک کنیم تا آن را بچرخاند. زمانی که مسیر را اشتباه راه میرود یا زمانی که بهطور غیرمنتظرهای متوقف میشود، حرکت کند.»
نویسندگان این مطالعه میگویند: «سایبورگ با مجهز شدن به چنین سیستمی با موفقیت متوسط نرخ جستجو و مسافت پیموده شده خود را به ترتیب تا 68 و 70 درصد افزایش داد، در حالی که زمان توقف تا 78 درصد کاهش یافت. ما ثابت کردهایم که اعمال تحریک الکتریکی روی سوسکها امکانپذیر است؛ میتواند بر عادت ذاتی خود غلبه کند، برای مثال، حرکت را در محیطهای تاریک و سرد که معمولاً حرکت خود را کاهش میدهد، افزایش دهد.»
در این مطالعه، cerci برای تحریک حرکت آزادانه سوسک ماداگاسکار (MHC) انجام شد.