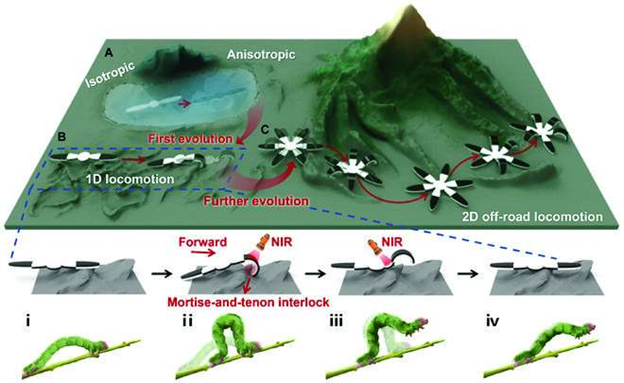
16 ژانویه 2023 -توسط ژانگ نانان، آکادمی علوم چین -تکامل تطبیقی و حرکت در همه سطح اسفنج PNIPAm. اعتبار: NIMTE
گروه مواد پلیمری هوشمند به سرپرستی پروفسور چن تائو در موسسه فناوری و مهندسی مواد نینگبو (NIMTE) آکادمی علوم چین (CAS)، با همکاری پروفسور ژنگ یینفی در دانشگاه ژجیانگ، یک ماده مبتنی بر هیدروژل توسعه داده اند. ربات نرم با تغییر شکل تطبیقی که می تواند به حرکت چند بعدی خارج از جاده در زمین های طبیعی دست یابد.
این اثر در Research منتشر شده است.
به عنوان یک فرآیند تکامل طبیعی، ارگانیسم ها به حرکت همه کاره مانند راه رفتن، خزیدن و شنا دست یافته اند تا با تغییرات محیط خارجی خود سازگار شوند. به عنوان یک کاندید ایده آل برای مواد بیومیمتیک، هیدروژل به دلیل خودتغییر شکل عالی و خواص مکانیکی بافت نرم، می تواند اشکال بیومیمتیک متنوعی تولید کند. با این حال، فعال کردن این تغییر شکل در محل برای مقابله با حرکت مستقل و فعال کردن وظایف متعدد همچنان چالش برانگیز است.
با الهام از رشد خود و تکامل موجودات زنده مانند کرمهای اینچ، یک لایه هیدروژل فتوترمال حاوی نانوذرات Fe3O4 بر روی سطح یک اسفنج همسانگرد پلی N-ایزوپروپیل آکریل آمید (PNIPAm) رشد داده شد، بنابراین یک ساختار دولایه ناهمسانگرد از طریق بینفاصله تشکیل شد. پلیمریزاسیون انتشاری
بر اساس تابش نور نزدیک به مادون قرمز برنامه ریزی شده، پیکربندی های ناهمسانگرد هیدروژل دولایه برای انطباق با تغییرات در محیط های خارجی مجدداً پیکربندی و مونتاژ شدند و درجات مختلفی از تغییر شکل و اشکال مختلف را نشان دادند.
به موجب تغییر شکل برنامهریزیشده فضایی، زمانی که محرک هیدروژل خم میشود یا بازیابی میشود، بهصورت پویا از طریق تعامل بین خود تغییرشکل و زمینهای ناهموار، یک اینترلاک مورتیس و تنون شکل میگیرد. بنابراین، محرک هیدروژل میتواند خزیدن کرمهای اینچ را تقلید کند تا نیروی محرکهای دورهای ایجاد کند و حرکت خارج از جاده را بر روی زیرلایههای ناهموار مصنوعی مختلف و زمینهای شنی طبیعی انجام دهد.
با بهره مندی از تغییر شکل تطبیقی، محرک هیدروژل خزنده حجم و حالت خزیدن خود را با هم افزایی هر شاخک تغییر داد، بنابراین با زمین های پیچیده از جمله گذر کوه، دره و خط الراس سازگار شد.
بر اساس مونتاژ چندین موتور هیدروژل، حتی یک محموله ساکن فعال شد و میتوانست روی بستر ناهموار دوبعدی بخزد یا از زمینهای شنی پیچیده عبور کند.این استراتژی گامی رو به جلو برای طراحی و توسعه ربات های نرم، مواد قابل تغییر شکل و دستگاه های بیومیمتیک است.