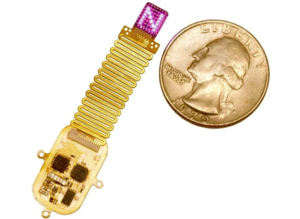
2 دسامبر 2022 -توسط ژانگ نانان، آکادمی علوم چین -سنسور نیرو/گشتاور شش بعدی اعمال شده بر روی یک دستکاری کننده شش محوره. اعتبار: ژائو ویوی
به عنوان بخشی جدایی ناپذیر از زندگی مدرن، سنسورها در حال حاضر تقریباً در همه جا وجود دارند. آنها ورودی فیزیکی از محیط را اندازه گیری می کنند و آن را به داده هایی تبدیل می کنند که می تواند توسط انسان یا ماشین تفسیر شود. یک سنسور نیرو/گشتاور شش بعدی جدید توسط یک تیم تحقیقاتی از موسسه علوم فیزیکی Hefei آکادمی علوم چین ساخته شده است.
پروفسور Sun Yuxiang که سرپرست تیم است، گفت: “بیش از سه دهه است که ما تحقیقات خود را در این زمینه آغاز کرده ایم.”
سنسور از ساختارهای مکانیکی و یک ماژول پردازش سیگنال تشکیل شده است. ماژول پردازش سیگنال عملکردهای پردازش سیگنال آنالوگ، پردازش سیگنال دیجیتال و انتقال سیگنال را انجام می دهد. تحقیقات این تیم بر ساختار الاستومرها و روش های پردازش سیگنال متمرکز است.
ساختار الاستومری بخش اصلی سنسور نیروی چند بعدی است. شکل آن بر حساسیت، عملکرد دینامیکی و جفت ابعادی سنسور تأثیر می گذارد. روش های پردازش سیگنال شامل فیلتر دیجیتال، جبران رانش دما، پردازش تحمل خطا و غیره است که برای بهبود نسبت سیگنال به نویز سنسور و اطمینان از دقت و پایداری اندازه گیری مهم هستند.
این حسگر را می توان برای کنترل بازخورد نیرو در زمان واقعی و تست خواص مکانیکی ربات های هوشمند استفاده کرد. این به ربات ها اجازه می دهد تا به طور همزمان اطلاعات نیرو و لحظه موقعیت را تشخیص دهند. ساختار غشایی دوگانه E-type با حقوق مالکیت معنوی مستقل برای تحقق یکپارچگی واحد حساس، ماژول تهویه سیگنال، SoC و ماژول ارتباطی اتخاذ شده است. با کمک حسگر، روبات ها می توانند حس و لمس کنند.
این تیم قادر به ارائه طراحی حسگر سفارشی با دقت بالا و پایداری برتر است. سان گفت: “ما می توانیم نیازهای مصرف کنندگان را برای محصولات سفارشی با قیمت های مناسب برآورده کنیم.”
آنها تاکنون آزمایش فشار 50 مگا پاسال را پشت سر گذاشته اند و مرحله بعدی آزمایش در دریاهای 4500 متری است.